Overview of this specification
About this product specification
It describes the performance of the manipulator or a complete family of manipulators
in terms of:
• The structure and dimensional prints
• The fulfilment of standards, safety and operating requirements
• The load diagrams, mounting of extra equipment, the motion and the robot
reach
• The specification of variants and options available
The product specification also contains information for the controller.
Usage
Product specifications are used to find data and performance about the product,
for example to decide which product to buy. How to handle the product is described
in the product manual.
Users
It is intended for:
• Product managers and product personnel
• Sales and marketing personnel
• Order and customer service personnel
References
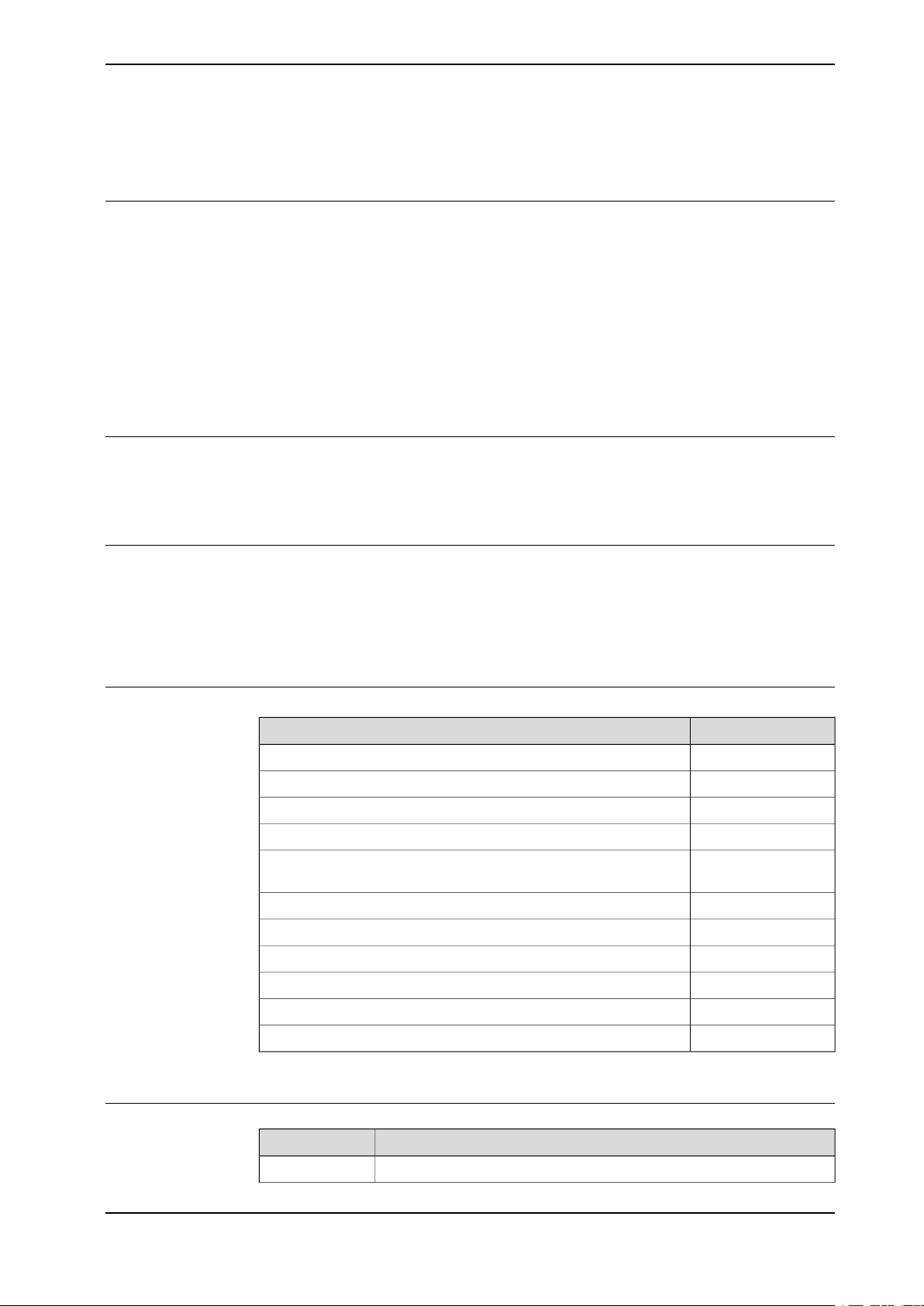
Document IDDocument name
3HAC064628-001Product manual, spare parts - IRB 14050
3HAC064627-001Product specification - IRB 14050
3HAC064626-001Product manual - Grippers for IRB 14050
3HAC064375-009Circuit diagram - IRB 14050
3HAC031045-001Safety manual for robot - Manipulator and IRC5 or OmniCore con-
troller i
3HAC042927-001Technical reference manual - Lubrication in gearboxes
3HAC060860-001Product manual - OmniCore C30
3HAC066553-001Technical reference manual - Event logs for RobotWare 7
3HAC065041-001Technical reference manual - System parameters
3HAC070208-001Application manual - Discrete I/O
3HAC066561-001Application manual - Conveyor tracking
iThis manual contains all safety instructions from the product manuals for the manipulators and the
controllers.
Revisions
DescriptionRevision
First edition.A
Continues on next page
Product specification - IRB 14050 7
3HAC064627-001 Revision: G
© Copyright 20192020 ABB. All rights reserved.
Overview of this specification