DescriptionRevision
• The force and torque values under endurance load and maximum
load have been updated. See Floor mounted on page 18.
• Ball screw spline unit is added to the warning listing the parts that
are easily damaged due to overload. See Information on page 20.
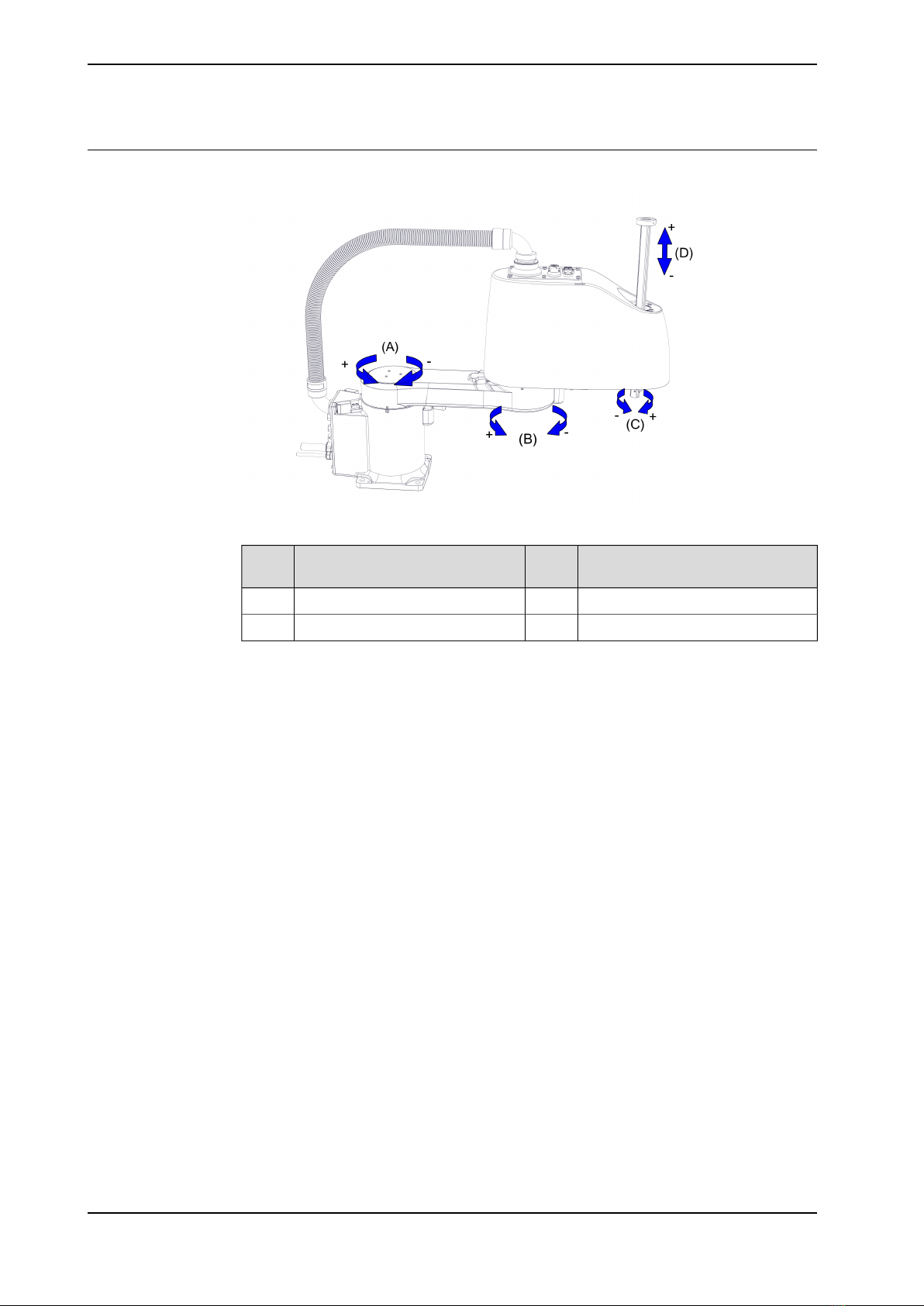
• Working range of axis 4 has been updated. See Robot motion on
page 36.
•Performance data of IRB 910SC-3/0.45 and IRB 910SC-3/0.65 has
been added. See Performance according to ISO 9283 on page 40.
• Velocity of axis 3 changes from 1.02 m/s to 1 m/s. See Velocity
on page 41.
• Minor changes.
A
Published in release R16.2. The following updates are done in this revi-
sion:
• Dimension drawing for fitting the end effector is updated. See
Fitting of end effector to the ball screw spline shaft on page 27.
B
Published in release R17.1. The following updates are done in this revi-
sion:
• Restriction of load diagram added.
• Changed protection from IP30 to IP20
C
Published in release R17.2. The following updates are done in this revi-
sion:
• Updated list of applicable standards.
• Improved picture of end effector dimension.
D
Published in release R18.2. The following updates are done in this revi-
sion:
• Updated the COG figure for describing max. moment of inertia.
E
Published in release R19D The following updates are done in this revi-
sion:
• Updated information about Absolute Accuracy.
• The graphic of working range changed.
F
Published in release R20C The following updates are done in this revi-
sion:
• Add section Extra loads.
G
8 Product specification - IRB 910SC
3HAC056431-001 Revision: G
© Copyright 2016-2020 ABB. All rights reserved.
Overview of this specification
Continued