2
1. Declaration of conformity....................................... 3
2. WEEE-Declaration .................................................... 4
3. Important Notes....................................................... 4
4. Features ..........................................................................5
4.1. General Features...........................................................5
4.2. Technical Data...............................................................5
4.3. Scope of delivery...........................................................5
4.4. Operating modes..........................................................6
4.4.1. Digital mode..............................................................6
4.4.2. Proportional mode ...................................................6
4.5. Servo types ...................................................................8
4.5.1. Analog servos ............................................................8
4.5.2. Digital servos .............................................................8
4.5.3. ESU servo drive .........................................................8
5. Connection to the digital system ........................... 9
5.1. Terminals ......................................................................9
5.2. Power supply by the digital system..............................10
5.3. External power supply ................................................10
5.4. Wiring the outputs .....................................................11
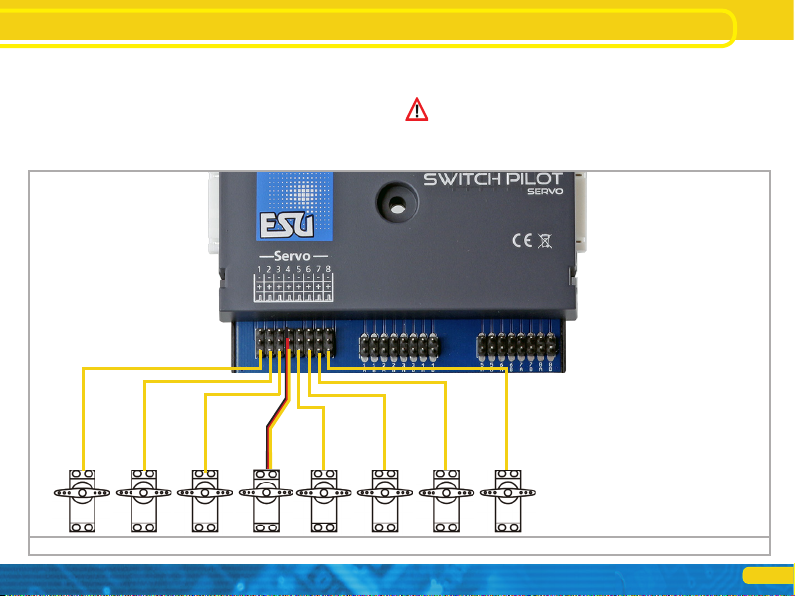
5.4.1. Servo connection ....................................................11
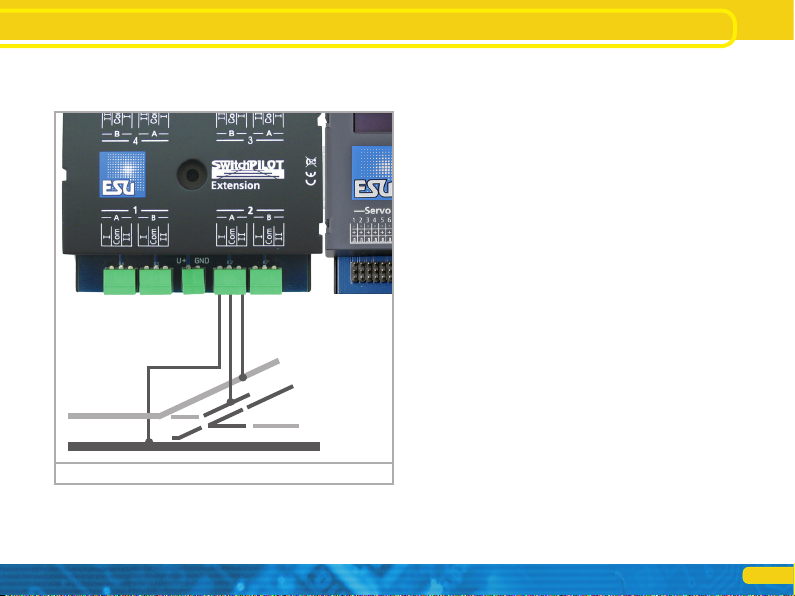
5.5. Connecting the SwitchPilot Extension .........................12
5.5.1. Relay outputs...........................................................12
5.5.2. Turnout frog polarization .........................................13
6. Configuration with OLED...................................... 14
6.1. Relationship accessory addresses / turnout numbers ...14
6.1.1. Assigning turnout numbers......................................15
6.2. Introduction to the operating structure.......................16
6.3. Address mode for ROCO® command stations ............17
6.4. Configuring outputs ...................................................17
6.4.1. Servo position und mode .........................................17
6.4.2. Servo speed and relay response time........................18
6.4.3. Servo seesaw effect (“Bouncing”)............................18
6.5. Servo pulse configuration............................................18
6.6. Function Mapping.......................................................19
Content
6.7. Status information ......................................................20
6.7.1. Display software version & track voltage ..................20
6.7.2. Displaying the status of the outputs.........................20
7. Configuration with LokProgrammer.................... 21
8. Configuration POM................................................ 22
8.1. Connection to the digital system.................................22
8.2. Reading and writing CVs with POM ...........................22
9. Configuration with the programming track........ 23
9.1. Connection to the digital system.................................23
9.2. Read & Write CVs .......................................................23
10. Learning turnout numbers from command station..23
11. RailCom® ............................................................. 24
11.1. RailCom® Configuration .........................................24
12. Direct switching with the inputs for push buttons... 24
13. Reset to factory default (decoder reset)............ 25
13.1. With the programming button..................................25
13.2. With DCC systems ....................................................25
13.3. With the display........................................................25
14. Support ................................................................. 25
15. Menu references .................................................. 26
16. Solenoid address & turnout numbers ................ 31
17. List of all supported CVs...................................... 33
18. Change history..................................................... 38
19. Warranty certificate............................................. 39