FOXTECH BABY SHARK 260 VTOL User Manual
©2019 FOXTECH All Rights Reserved 3
Basic Theory
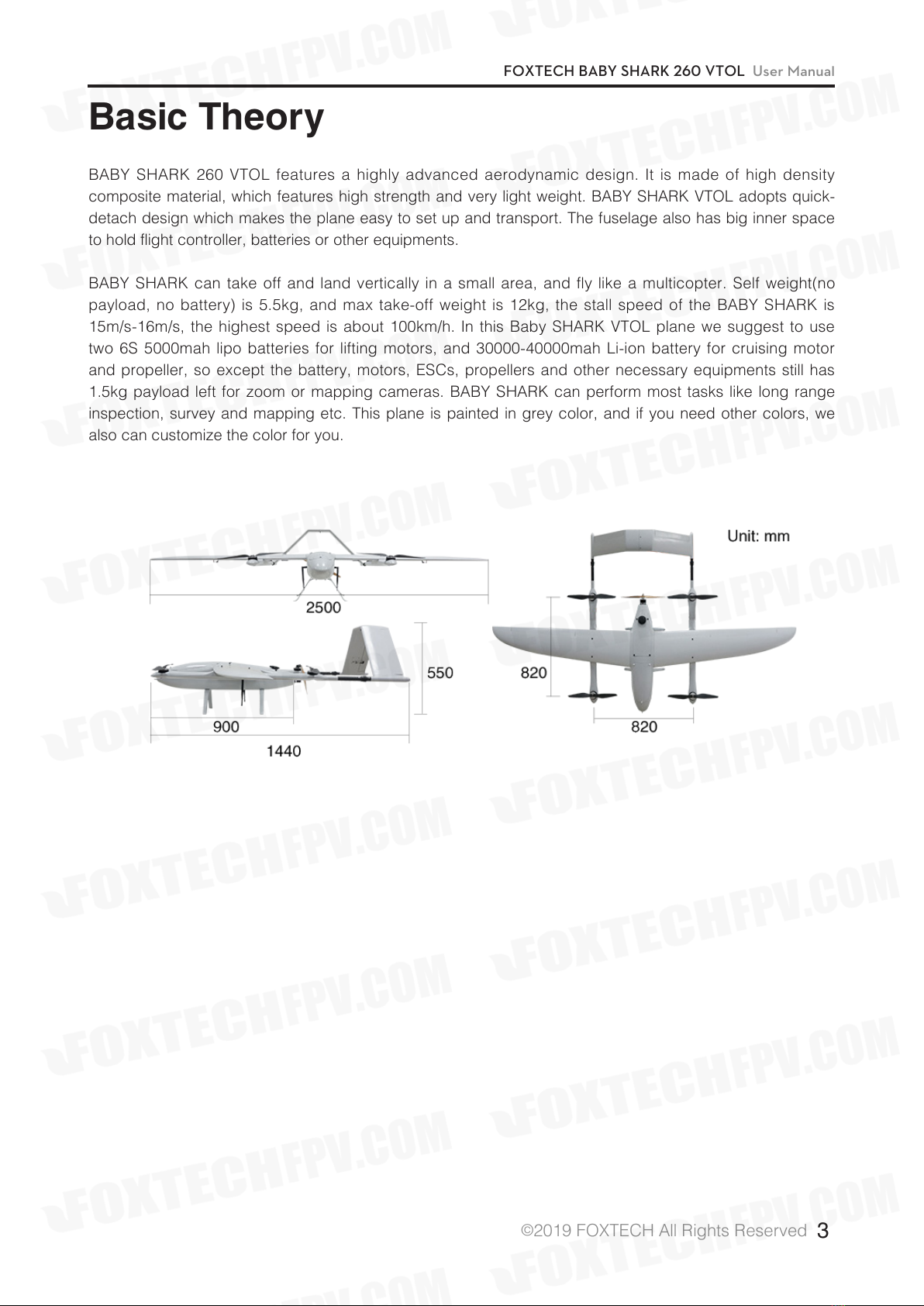
BABY SHARK 260 VTOL features a highly advanced aerodynamic design. It is made of high density
composite material, which features high strength and very light weight. BABY SHARK VTOL adopts quick-
detach design which makes the plane easy to set up and transport. The fuselage also has big inner space
to hold flight controller, batteries or other equipments.
BABY SHARK can take off and land vertically in a small area, and fly like a multicopter. Self weight(no
payload, no battery) is 5.5kg, and max take-off weight is 12kg, the stall speed of the BABY SHARK is
15m/s-16m/s, the highest speed is about 100km/h. In this Baby SHARK VTOL plane we suggest to use
two 6S 5000mah lipo batteries for lifting motors, and 30000-40000mah Li-ion battery for cruising motor
and propeller, so except the battery, motors, ESCs, propellers and other necessary equipments still has
1.5kg payload left for zoom or mapping cameras. BABY SHARK can perform most tasks like long range
inspection, survey and mapping etc. This plane is painted in grey color, and if you need other colors, we
also can customize the color for you.






















 user manual")