Ultrasonic Wind Speed and Direction Smart Sensor (S-WCG-M003) Manual
1-800-LOGGERS 5 www.onsetcomp.com
8. Follow the steps in North Alignment to make sure the
sensor is pointed to true north.
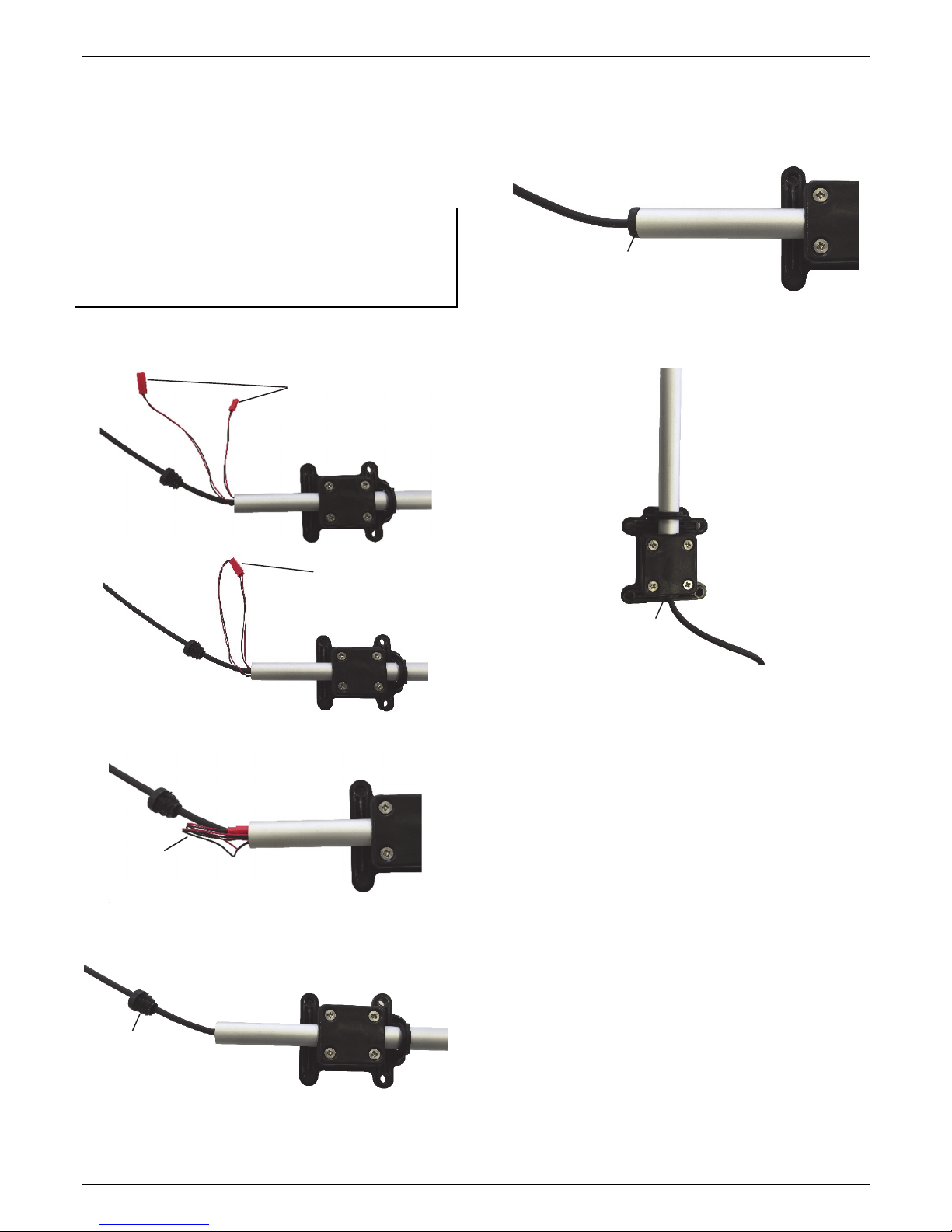
Mounting on a Vertical Surface
Follow these instructions for mounting the sensor on a wooden
post or vertical surface with user-supplied screws.
1. Connect the battery if you haven’t already done so (see
Connecting the Sensor Battery).
2. Hold the sensor rod base against the surface where you will
be mounting the sensor and use a pencil to mark the
location of the four screw holes on the base.
3. Use a drill with a 5 mm (3/16 inch) drill bit to make pilot
holes in these locations.
4. Drive four lag screws with a maximum diameter of 6 mm
(0.24 inches) through the holes in the sensor base and into
the mounting surface.
5. Follow the steps in North Alignment to make sure the
sensor is pointed to true north.
North Alignment
The sensor must be oriented to true north to obtain meaningful
wind direction data.
Tools required:
•Alignment tool (included)
•GPS or compass
•Flag, cone, or other temporary marker
•Phillips-head screwdriver
1. Use a Phillips-head screwdriver to slightly loosen the four
screws on the sensor rod mounting base so that the sensor
rod can be adjusted. (If the rod already moves freely, you
do not need to loosen the screws any further.)
2. Clip the alignment tool on the sensor tube and slide it so
that it snaps into the dedicated slots. Do not tamper with
the slots. The tool must gently find its place.
3. Using your GPS or a magnetic compass, go to a point that is
directly north of the station and at least 100 m (328 ft)
away from the station. To determine this point, move until
the station is directly south of you.
•Compass instructions:
a. Get the declination angle for your location to align the
sensor to true north. Worldwide declination information
is available at https://www.ngdc.noaa.gov/geomag-
web/#declination.
b. Go about 100 m (328 ft) to the north of the station with
a marker (e.g. flag or orange cone) and compass.
c. Using the compass, move to where the station is due
south of you and determine true north by doing the
following:
•If there is a west declination, move due west from
your position until the station is east by the
declination angle from magnetic south.
•If there is an east declination, move due east from
your position until the station is west by the
declination angle from magnetic south.
d. Place your marker where you are standing (this is true
north).
•GPS instructions: Establish a waypoint with the handheld
GPS receiver. You may want to use averaging to minimize
the waypoint position error if your GPS receiver is so
equipped. (For best results, the estimated position error
of the waypoint should be less than 10 feet if the
distance to the sensor is 100 meters, and less than 20
feet for a distance of 200 meters.) Mark the waypoint
with a flag, orange cone, or other suitable marker. Walk
back to the sensor and determine the bearing to the
waypoint you just created with the GPS receiver. Again
you may need to determine the average value of the
bearing to keep the errors to a minimum.
Loosen the four
screws on the
mounting base
(shown on
cross arm in
this example)
Alignment tool
clipped in place