RFID read/write head with CANopen interface
2
Contents
1 Preliminary note � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 4
1�1 Symbols used� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 4
2 Safety instructions � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 4
2�1 General� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 4
2�2 Target group � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 4
2�3 Electrical connection � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 4
2�4 Tampering with the device � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 5
3 General information � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 5
3�1 CANopen technology � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 5
3�2 Reference� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 5
4 Functions and features � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 6
5 Installation� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 6
5�1 General installation instructions � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 6
5�2 Notes on ID tag mounting� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 6
5�3 Avoiding interference � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 6
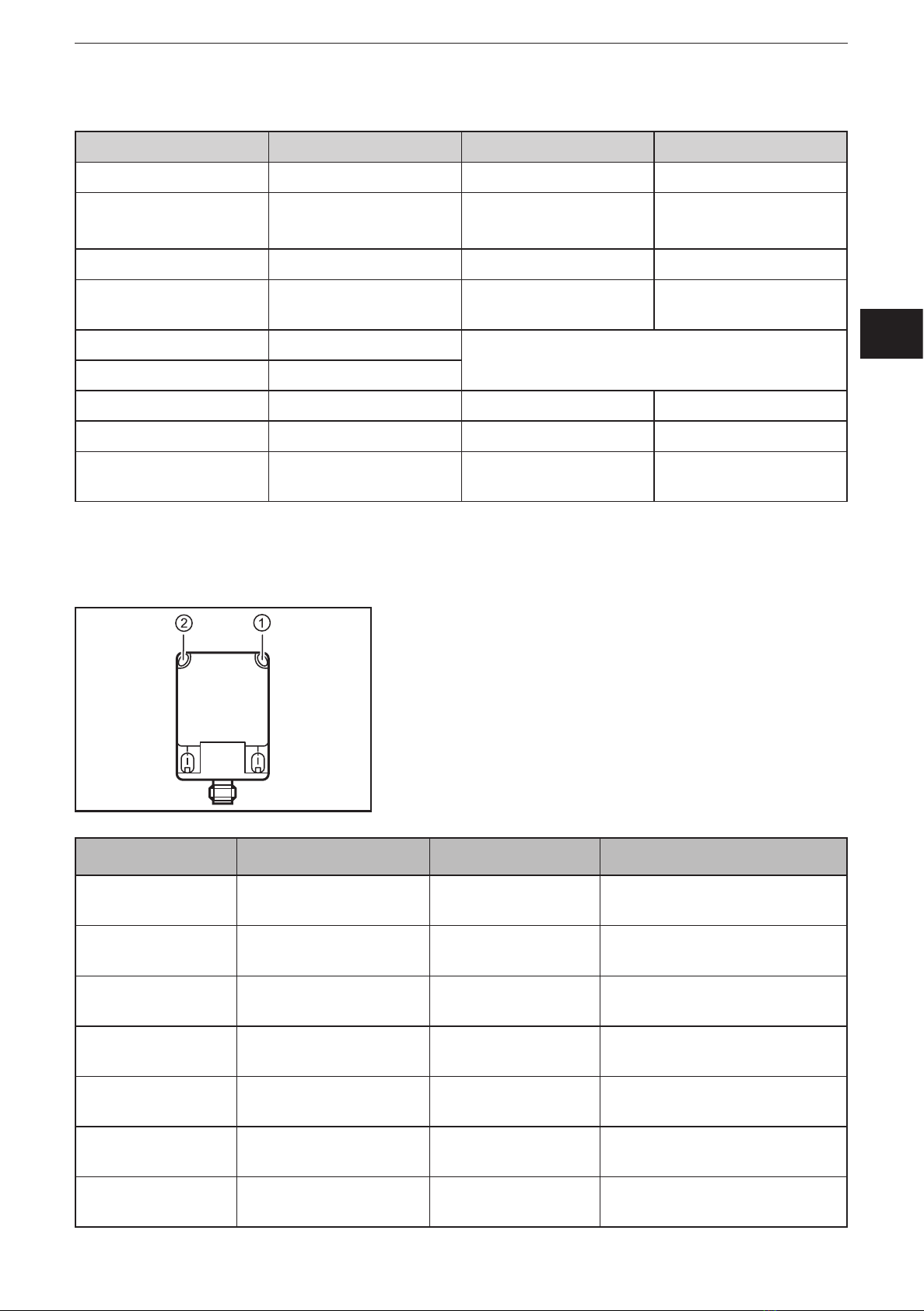
6 Indicators of the DTM424 / 425 / 428 / 434 / 435 � � � � � � � � � � � � � � � � � � � � � � � � 7
7 Indicators of the DTC510 � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 7
8 Indicators of the DTC600 � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 8
9 CANopen interface � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 9
9�1 CANopen functions � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 9
9�2 Change the node ID and bit rate � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 9
9�2�1 Change the node ID and bit rate in the object directory� � � � � � � � � � 10
9�2�2 Set the note ID and bit rate via LSS� � � � � � � � � � � � � � � � � � � � � � � � � 10
9�3 Set-up� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �11
9�4 Use with 32-bit data types � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �11
9�5 Communication types of the process data object (PDO) � � � � � � � � � � � � � �11
9�6 Object directory (OD) � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 13
9�7 Error messages � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 17
9�8 Monitoring activity via heartbeat� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 19
9�9 Change objects � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 19
9�10 Process data objects � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 20
9�10�1 Transmit process data objects (TPDO) � � � � � � � � � � � � � � � � � � � � � 20
9�10�2 Receive process data objects (RPDO) � � � � � � � � � � � � � � � � � � � � � 21
9�11 Device status � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 22
9�12 Deactivate antenna � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 23
9�13 Select the ID tag type � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 24
9�14 Read information of an ID tag � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 25
9�15 RSSI value � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 25
9�16 ID tag detection filter � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 26
9�16�1 Object UID filter depth � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 27
9�16�2 Object zero ID filter depth � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 27