2
Contents
1 Preliminary note.............................................................................................. 4
1.1 Symbols used .......................................................................................... 4
1.2 Warnings used......................................................................................... 4
1.3 Legal and copyright information............................................................... 4
2 Safety instructions .......................................................................................... 4
3 Intended use ................................................................................................... 6
4 Items supplied................................................................................................. 6
5 Function .......................................................................................................... 6
5.1 ID tags ..................................................................................................... 6
5.2 CANopen technology............................................................................... 6
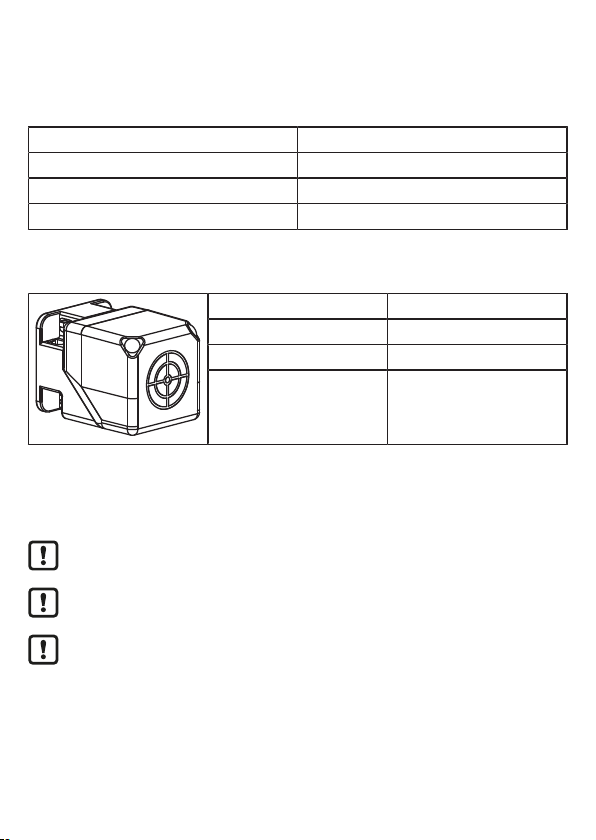
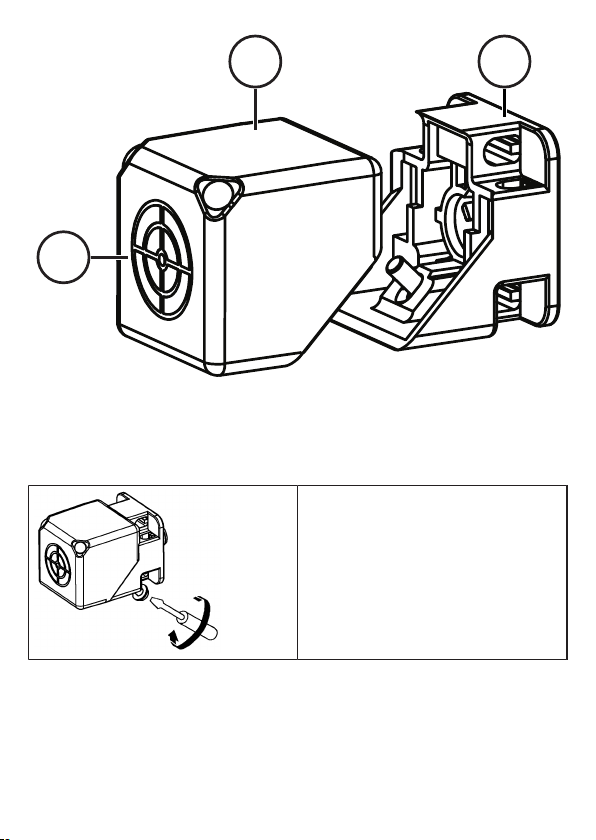
5.3 Device overview....................................................................................... 7
6 Installation....................................................................................................... 7
6.1 Notes on the unit installation.................................................................... 7
6.2 Avoiding interference ............................................................................... 7
6.3 Mechanical design ................................................................................... 8
6.4 Alignment of the sensing face.................................................................. 9
6.5 Install device ............................................................................................ 10
6.6 Mounting distances.................................................................................. 12
6.7 Positioning of the ID tag........................................................................... 12
7 Electrical connection....................................................................................... 13
7.1 Wiring....................................................................................................... 13
8 Operating and display elements ..................................................................... 14
9 Operation ........................................................................................................ 15
9.1 CANopen interface .................................................................................. 15
9.1.1 CANopen functions ........................................................................... 15
9.1.2 Change the Node ID and bit rate ...................................................... 16
9.1.3 Set-up ............................................................................................... 17
9.1.4 Use of 32 bit data types .................................................................... 18
9.1.5 Communication types of the process data object (PDO) .................. 18
9.1.6 Object directory (OD) ........................................................................ 19
9.1.7 Error messages................................................................................. 33