Contents
? KUKA Roboter GmbH 2005 / SM KR30-3 09.05.00 en Page 3 of 140
Contents
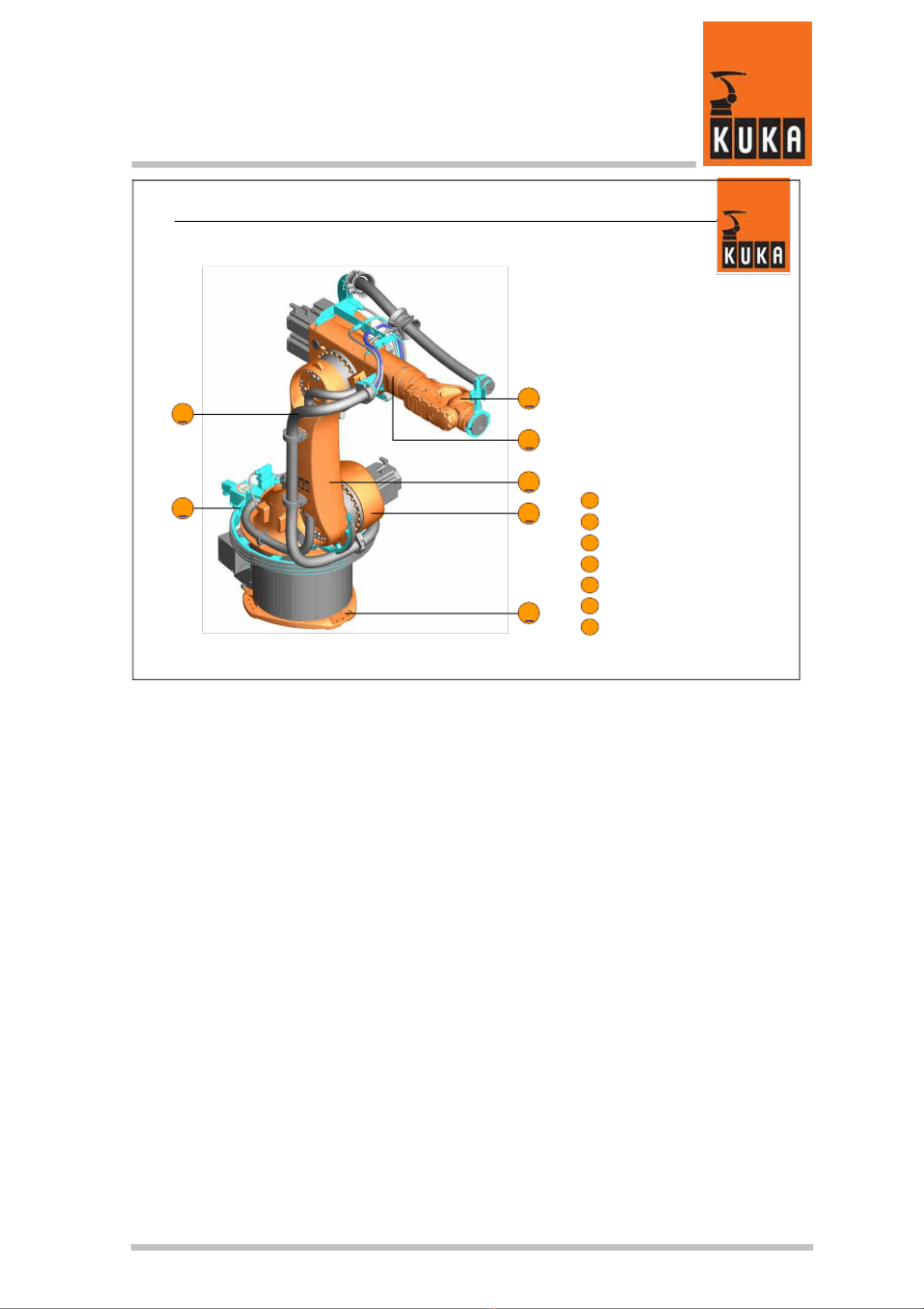
1. Overview Robot............................................................................. 5
2. Disassembly .................................................................................. 9
2.1. Wrist ....................................................................................... 9
2.2. Arm....................................................................................... 13
2.3. Link arm ............................................................................... 21
2.4. Rotating column ................................................................... 27
2.5. Base unit .............................................................................. 35
2.6. Energy supply ...................................................................... 37
2.7. Axis monitoring..................................................................... 51
3. Assembly..................................................................................... 55
3.1. Base unit .............................................................................. 55
3.2. Rotating column ................................................................... 57
3.3. Link arm ............................................................................... 63
3.4. Arm....................................................................................... 69
3.5. Wrist ..................................................................................... 75
3.6. Energy supply ...................................................................... 81
3.7. Axis monitoring..................................................................... 95
4. Maintenance................................................................................ 99
4.1. Wrist axes ............................................................................ 99
4.2. Basic axes..........................................................................109
5. Exercises...................................................................................113
6. Tightening torques table............................................................139