iii
Robotic Pod (Stadium) Quick Start GuideRobotic PodQuick Start Guide
Contents
Chapter 1 Quick Start..................................................................... 1
Important safety instructions ...............................................1
Power and connections ................................................1
General care...................................................................1
Location .........................................................................2
Intellectual property.....................................................2
Overview .................................................................................3
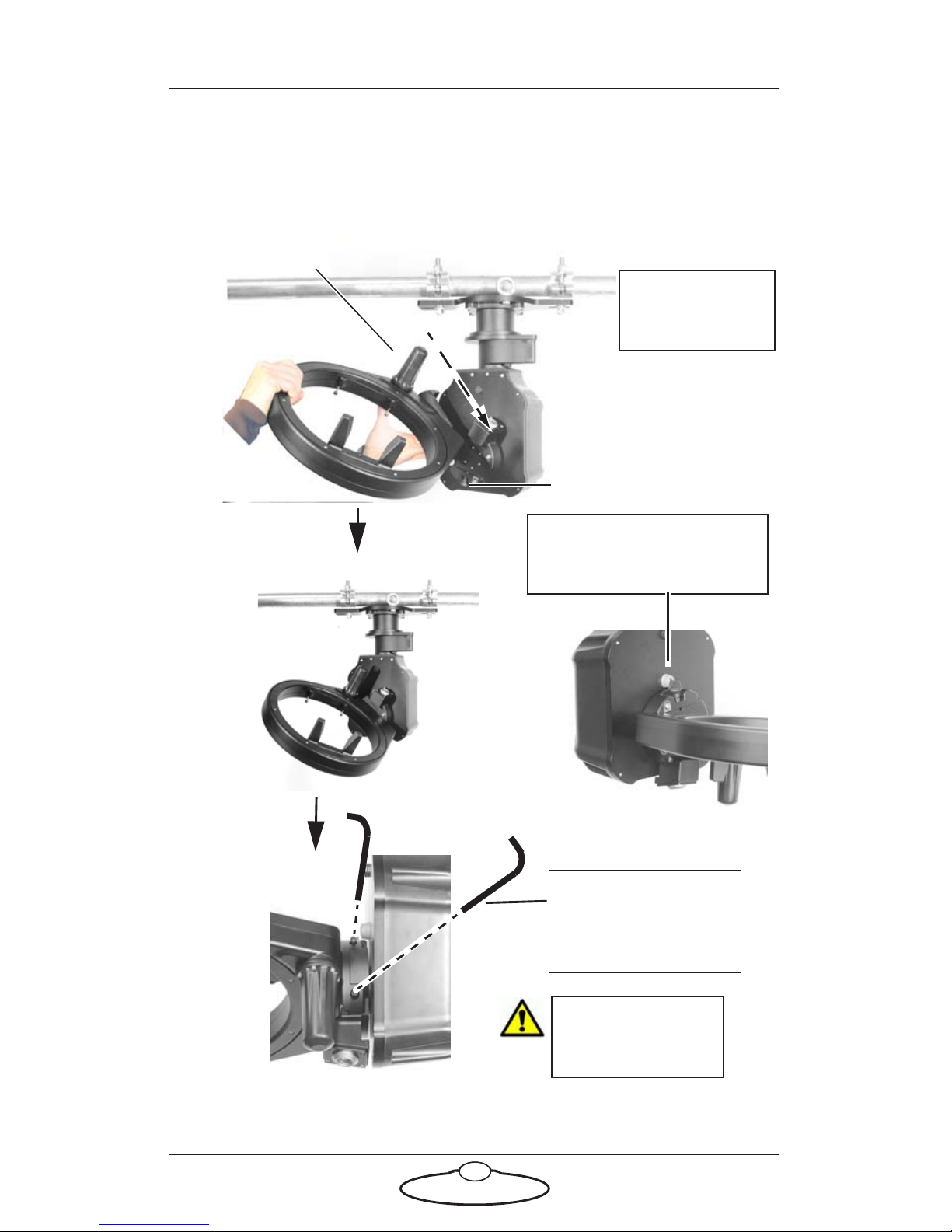
Setting up the hardware ........................................................3
Connecting the cables ...........................................................9
Setting up the Robotic Pod System using the MHC
software .................................................................................11
Home Zeroing .....................................................................12
Changing system configuration and network settings....13
Launching MHC as Admin .......................................13
Network setup ......................................................................15
Adding Pods ................................................................15
Adding Pods by using FIND............................15
Adding Pods manually......................................16
Changing a Pod’s name..............................................16
Assigning Pods to user(s) ..........................................16
Removing a Pod..........................................................17
Editing network settings on the Pod........................17
Adding users.........................................................................17
Changing the Server IP address................................18
Logging in as a User ...................................................18
TDCGraphics software ..............................................19
Port tabs .......................................................................20
Polycam system ....................................................................22
Polycam settings..........................................................22
Tracking data...............................................................26