Siko ASA510 Operation manual
ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07 1
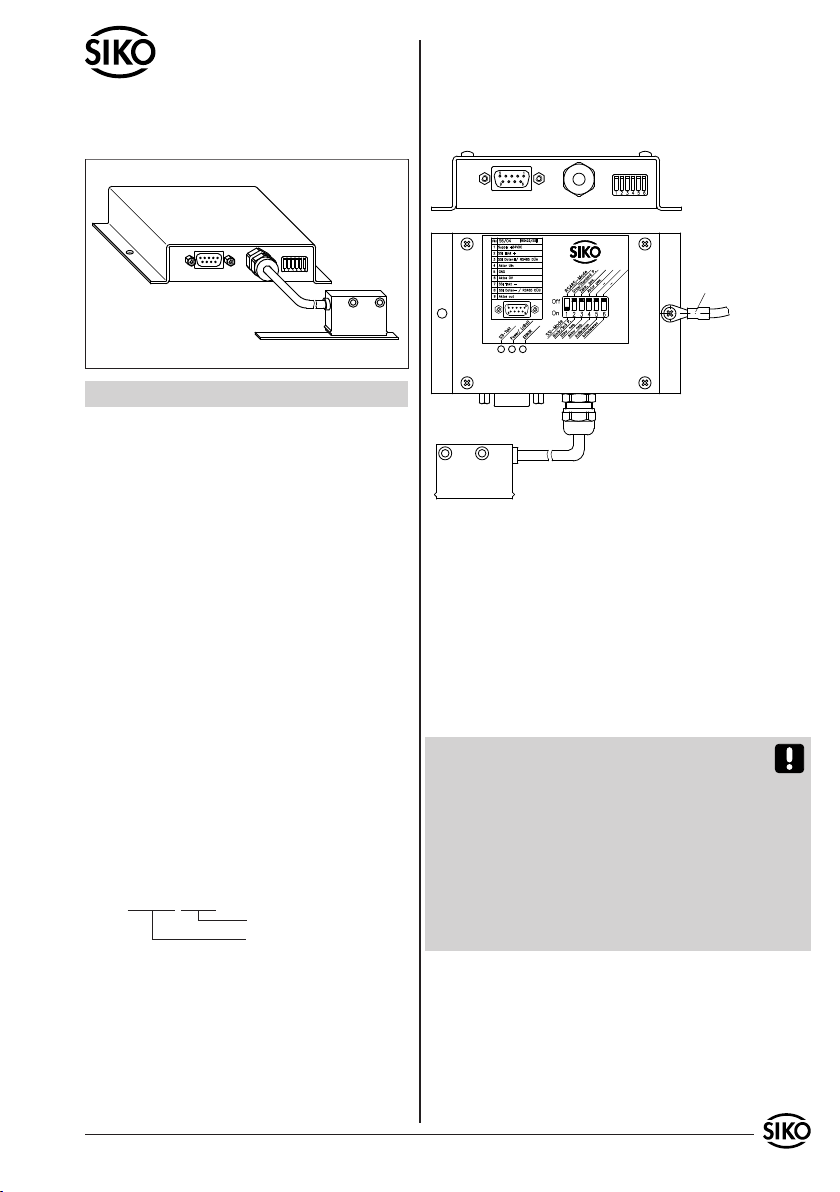
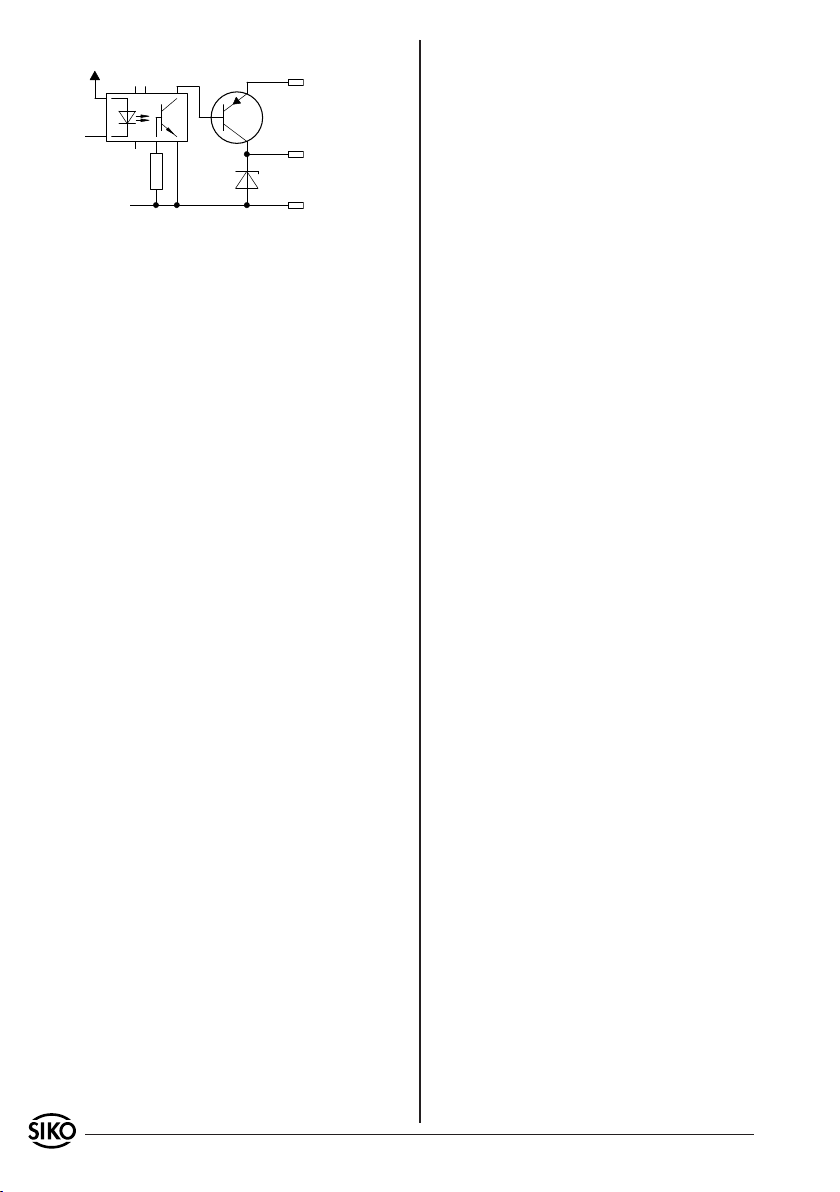
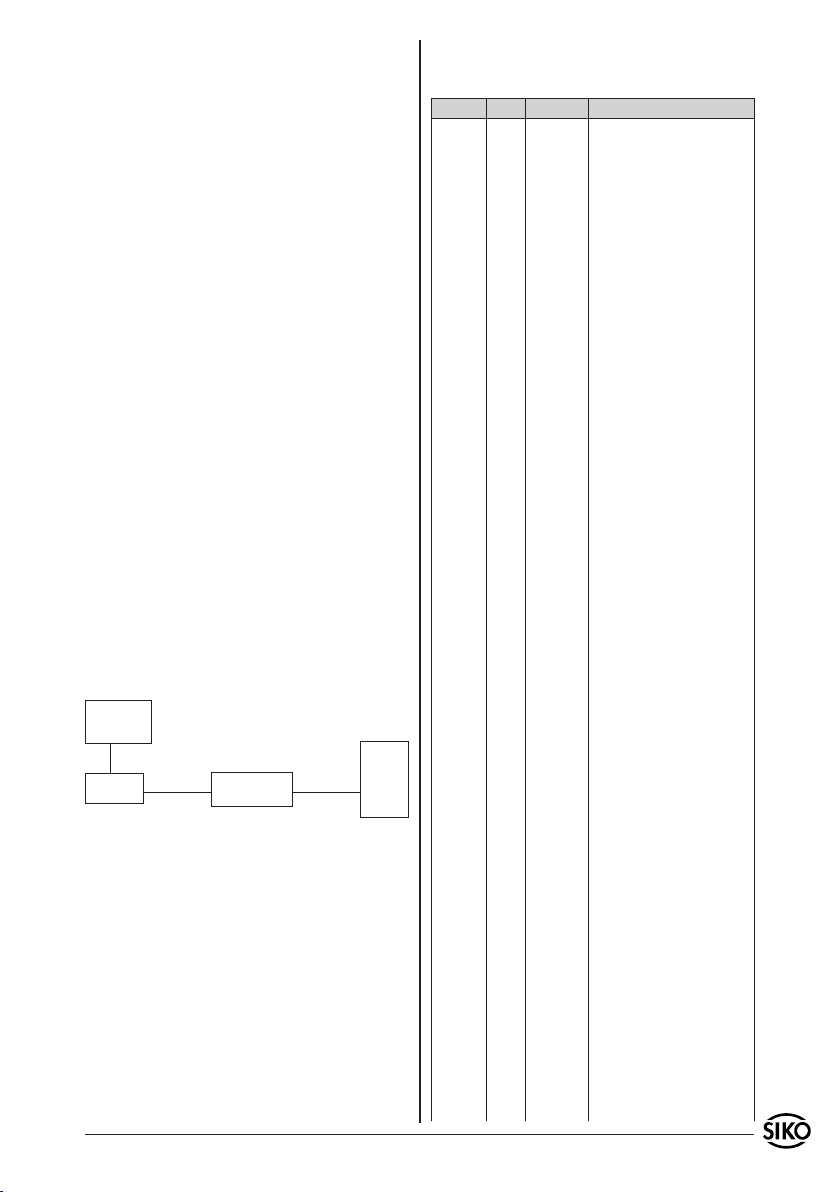
Abb. 1: Montage Auswerteelektronik/ Anschlüsse
Anschluss-
möglichkeit
für Potential-
ausgleich
DEUTSCH
1. Gewährleistungshinweise
Lesen Sie vor der Montage und der Inbetriebnahme
dieses Dokument sorgfältig durch. Beachten Sie zu
Ihrer eigenen Sicherheit und der Betriebssicherheit
alle Warnungen und Hinweise.
Ihr Produkt hat unser Werk in geprüftem und be-
triebsbereitem Zustand verlassen. Für den Betrieb
gelten die angegeben Spezifikationen und die
Angaben auf dem Typenschild als Bedingung.
Garantieansprüche gelten nur für Produkte der
Firma SIKO GmbH. Bei dem Einsatz in Verbindung
mit Fremdprodukten besteht für das Gesamtsystem
kein Garantieanspruch.
Reparaturen dürfen nur im Werk vorgenommen
werden. Für weitere Fragen steht Ihnen die Firma
SIKO GmbH gerne zur Verfügung.
2. Identifikation
Das Typenschild zeigt den Gerätetyp mit Varian-
tennummer. Die Lieferpapiere ordnen jeder Vari-
antennummer eine detaillierte Bestellbezeichnung
zu.
z.B. ASA510-0023
Varianten-Nr.
Geräte-Typ
3. Mechanische Montage
Die Montage darf nur gemäß der angegebenen IP-
Schutzart vorgenommen werden. Das System muss
ggfs. zusätzlich gegen schädliche Umwelteinflüs-
se, wie z.B. Spritzwasser, Lösungsmittel, Staub,
Schläge, Vibrationen, starke Temperaturschwan-
kungen geschützt werden.
•
•
•
•
3.1 Montage Auswerteelektronik
Das Gerät ist für die Montage mittels Schraubbe-
festigung vorgesehen. Die seitlich an den Laschen
vorhandenen Bohrungen können zum direkten An-
schrauben verwendet werden (siehe Abb.1).
Benutzerinformation
ASA510 + MB500
Auswerteelektronik
3.2 Montage Magnetband
Die Montage muss plan zur Montagefläche bzw.
der zu messenden Strecke erfolgen. Welligkeiten
verschlechtern immer die Messgenauigkeit. Es ist
für ausreichenden mechanischen Schutz zu sorgen
(z.B. gegen Schläge und Vibration).
Aus technischen Gründen muss bei der Länge, ge-
genüber der Messstrecke, ein Zumaß von 100mm
berücksichtigt werden.
Achtung! Um optimale Verklebungen zu errei-
chen müssen alle antiadhäsiven Fremdsubstanzen
(Öl, Fett, Staub usw.) durch möglichst rückstands-
los verdunstende Reinigungsmittel entfernt wer-
den. Als Reinigungsmittel eignen sich u.a. Ketone
(Aceton) oder Alkohole, die u.a. von den Firmen
Loctite und 3M als Schnellreiniger angeboten wer-
den. Die Klebeflächen müssen trocken sein und es
ist mit höchstmöglichem Anpressdruck zu verkle-
ben. Die Verklebungstemperatur ist optimal zwi-
schen 20°C und 30°C in trockenen Räumen.
Tip! Bei Verklebung langer Bänder sollte die
Schutzfolie des Klebebandes über eine kurze Teil-
strecke abgezogen werden, um das Band zu fixie-
ren. Daraufhin erfolgt das Ausrichten des Bandes.
Nun kann über die restliche Länge die Schutzfolie,
unter gleichzeitigem Andruck des Bandes, seitlich
herausgezogen werden. (Als Andruckhilfe kann z.B.
eine Tapetenandrückwalze verwendet werden.)
2 ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07
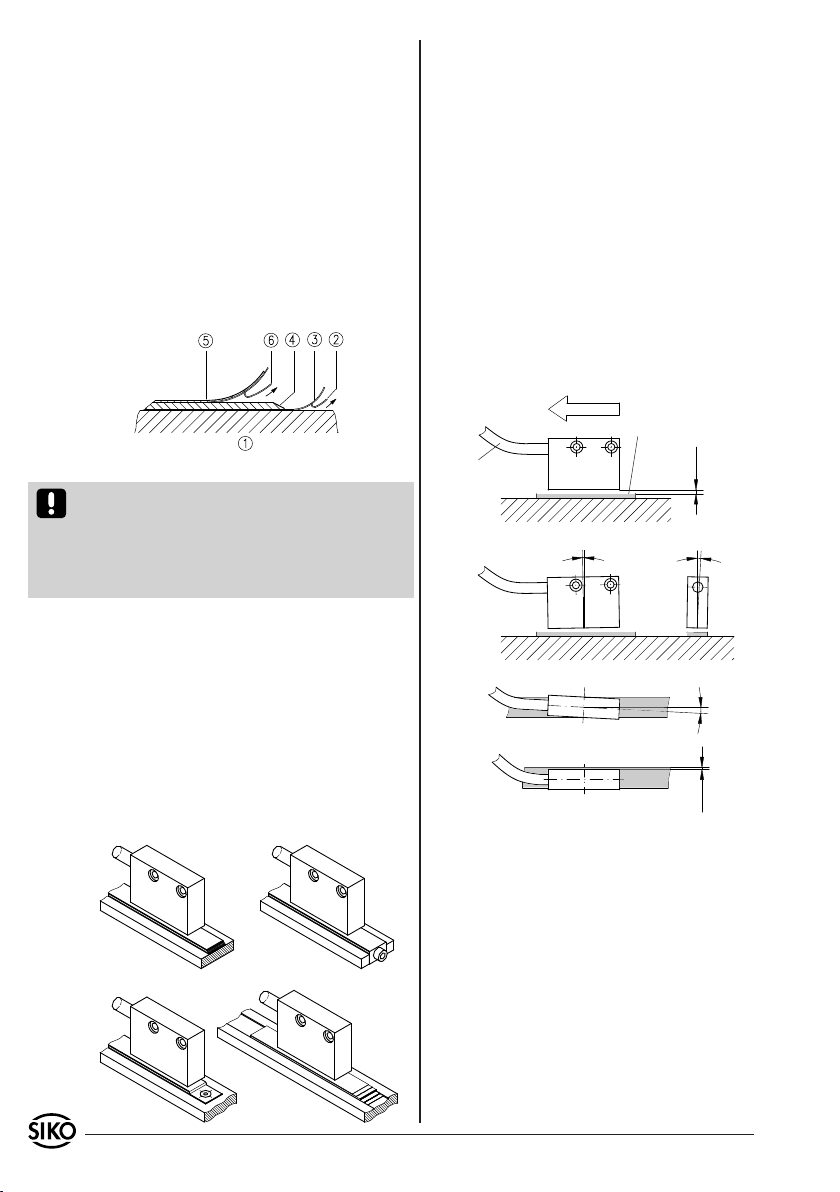
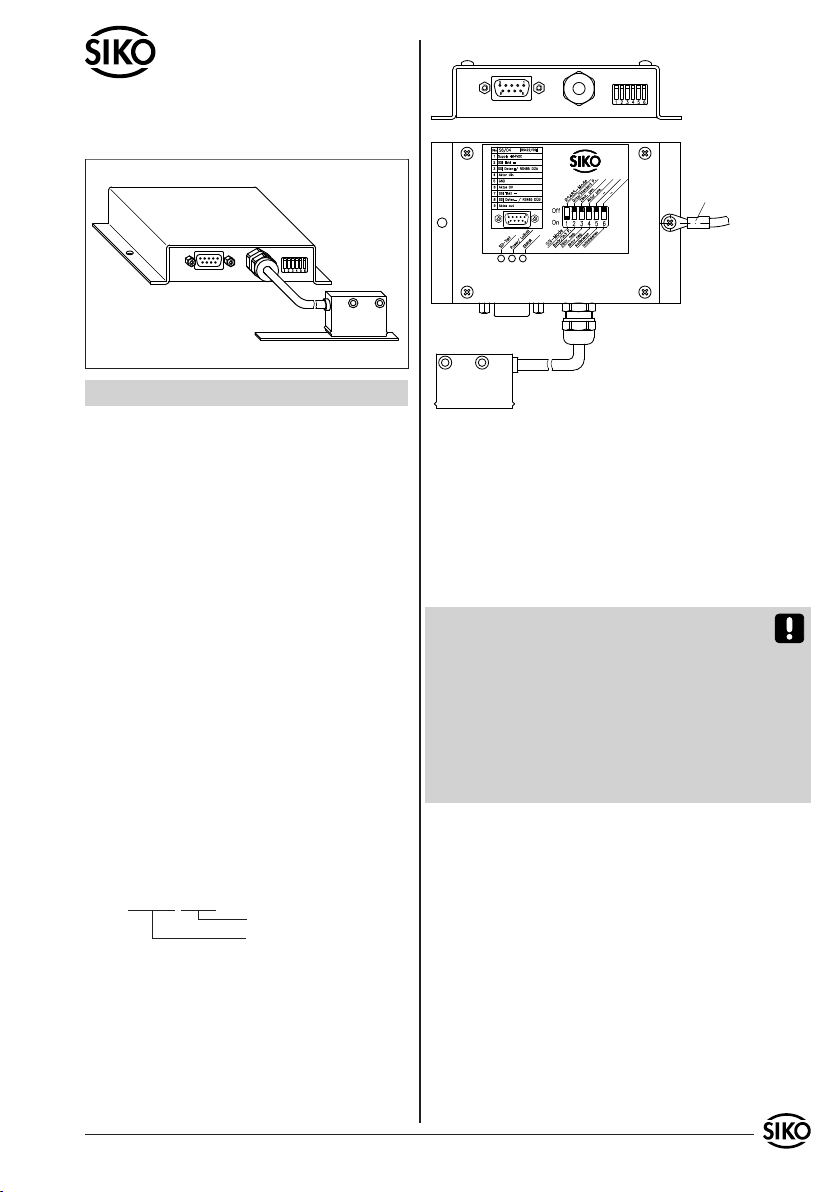
Abb. 2: Montage Magnetband
Abb. 3 Abb. 4
Abb. 5 Abb. 6
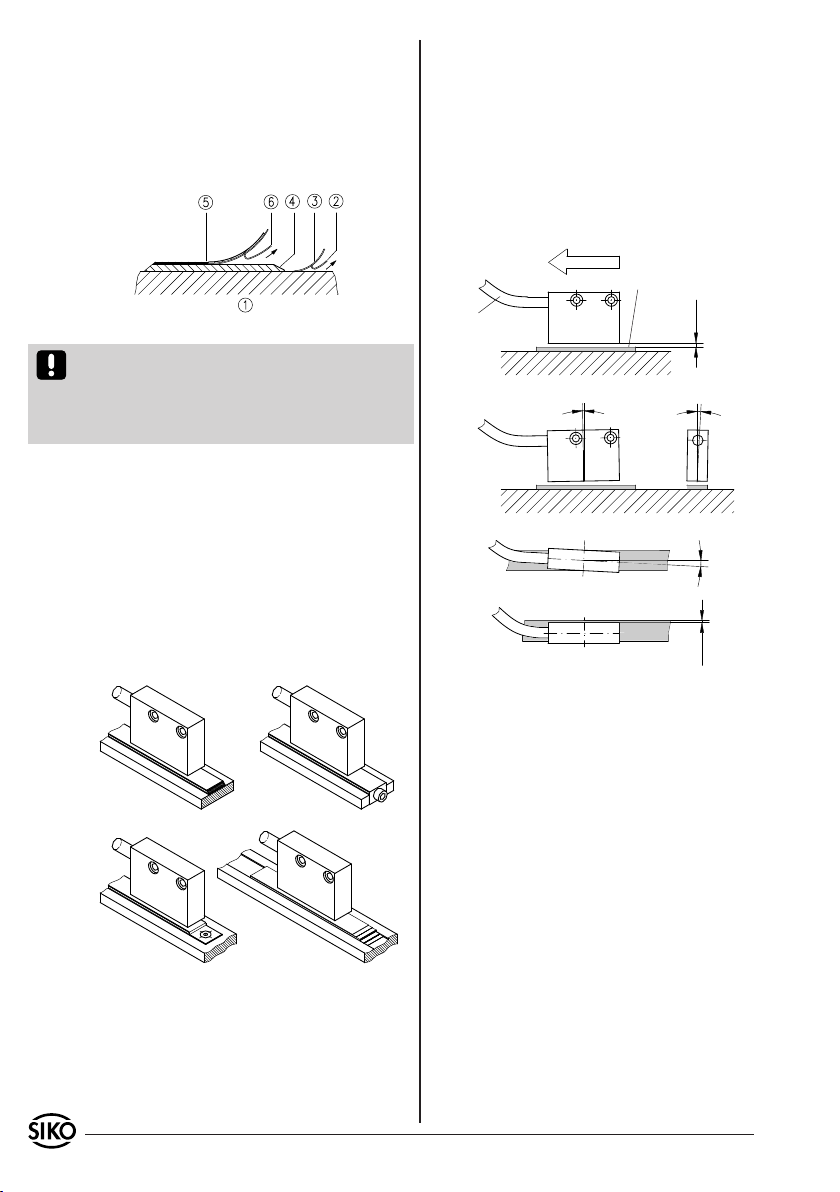
Abb. 7: Montagetoleranzen
Positive Zählrich-
tung (default)
aktive Seite
0.1mm...2.0mm
Kabelabgangs-
richtung
Abstand Sensor/Magnetband
<1° <3°
maximale Fluchtungsfehler
<3°
±1.0
Montageschritte (Abb. 2)
Befestigungsfläche (1) sorgfältig reinigen.
Am Magnetband die Schutzfolie (2) des Klebe-
bandes (3) entfernen.
Magnetband (4) unter Berücksichtigung der
Pfeilrichtung aufkleben.
Magnetbandoberfläche sorgfältig reinigen.
Am Abdeckband (5) die Schutzfolie (6) des Kle-
bebandes entfernen.
Abdeckband aufkleben (an beiden Enden leicht
überlappen lassen).
Die überlappenden Enden des Abdeckbandes gegen
Ablösen sichern.
•
•
•
•
•
•
•
3.3 Montage Sensor
Die Lage des Sensors zum Magnetband ist genau
definiert. Bei der Montage ist insbesondere zu be-
achten, dass über die gesamte Messstrecke zwi-
schen Band und Sensor ein Luftspalt eingehalten
wird, unabhängig ob das Band oder der Sensor
bewegt werden (Abb. 7).
Innerhalb der angegebenen Lageabweichung Abb.7
ist der Messfehler vernachlässigbar.
Der maximale Abstand zwischen Sensor und
Band (ohne Abdeckband) beträgt 2mm. Bei
Verwendung eines Abdeckbandes reduziert sich
der eff. Abstand um die Dicke des Abdeckban-
des inkl. Klebefolie. Der Sensor sollte das Mag-
netband nicht berühren.
Die Addition der Montagetolerenzen in allen Ebe-
nen muss vermieden werden.
Achtung! Die Beeinflussung durch magnetische
Felder ist zu vermeiden. Insbesondere dürfen kei-
ne Magnetfelder (z.B. Haftmagnete oder andere
Dauermagnete) in direkten Kontakt mit dem Ma-
gnetband geraten. Gleiches gilt für den Sensor im
Betrieb.
Montagebeispiele
Die einfache Montageart durch angeschrägtes
Schutzband (Abb. 3) ist nur in sehr geschützter
Umgebung zu empfehlen. Bei ungeschützer Um-
gebung besteht Abschälgefahr. In solchen Fällen
sind Montagearten wie in Abb. 4 und 5 gezeigt,
geeigneter.
Den optimalen Schutz bietet die Montage in ei-
ner Nut (Abb. 6), die so tief sein sollte, dass das
Magnetband vollständig darin eingebettet werden
kann (z.B. SIKO-PSA-Schiene).
4. Elektrischer Anschluss
Anschlussverbindungen dürfen nicht unter Span-
nung geschlossen oder gelöst werden!
Verdrahtungsarbeiten dürfen nur spannungslos
erfolgen!
Vor dem Einschalten sind alle Leitungsanschlüsse
und Steckverbindungen zu überprüfen.
Um eine störungsfreie Funktion des Gerätes si-
cherzustellen, ist der fachgerechte Anschluss an
den Potentialausgleich unbedingt erforderlich.
Um dies sicherzustellen, sind dem Lieferumfang
je eine Ringöse für den Anschluss einer max.
2,5mm² Leitung, alternativ ein Flachsteckerver-
•
•
•
•
ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07 3
binder sowie eine Zahnscheibe beigelegt. Der
Anschluss sollte so kurz wie möglich ausgeführt
werden (siehe Abb. 1).
Hinweise zur Störsicherheit
Alle Anschlüsse sind gegen äußere Störeinflüsse
geschützt. Der Einsatzort ist aber so zu wählen,
dass induktive oder kapazitive Störungen nicht
auf den Sensor oder dessen Anschlussleitung
einwirken können! Durch geeignete Kabelführung
und Verdrahtung können Störeinflüsse (z.B.von
Schaltnetzteilen, Motoren, getakteten Reglern
oder Schützen) vermindert werden.
Erforderliche Maßnahmen:
Nur geschirmtes Kabel verwenden. Den Kabel-
schirm beidseitig auflegen. Litzenquerschnitt der
Leitungen 0,25mm².
Die Verdrahtung von Abschirmung und Masse
(0V) muss sternförmig und großflächig erfolgen.
Der Anschluss der Abschirmung an den Potenti-
alausgleich muss großflächig (niederimpedant)
erfolgen.
Das System muss in möglichst großem Abstand von
Leitungen eingebaut werden, die mit Störungen
belastet sind; ggfs. sind zusätzliche Maßnahmen
wie Schirmbleche oder metallisierte Gehäuse
vorzusehen. Leitungsführungen parallel zu Ener-
gieleitungen vermeiden.
Schützspulen müssen mit Funkenlöschgliedern
beschaltet sein.
Um die Störfestigkeit der ASA510 zu erhöhen,
ist es notwendig die Anschlussleitung für die
Versorgungsspannung und Ausgangssignale mit
einer Ferrit-Hülse zu versehen, die in möglichst
geringem Abstand zu der D-SUB Verbindung
montiert werden sollte. Da der Außendurchmesser
von der Art der verwendeten Anschlussleitung
abhängt, sollte die Hülse möglichst passgerecht
ausgewählt werden.
Eine Verlängerung bzw. Auftrennen der Sensor-
leitung ist nicht zulässig.
Spannungsversorgung: 24VDC -20% ... +20%
Leistungsaufnahme: < 5 Watt
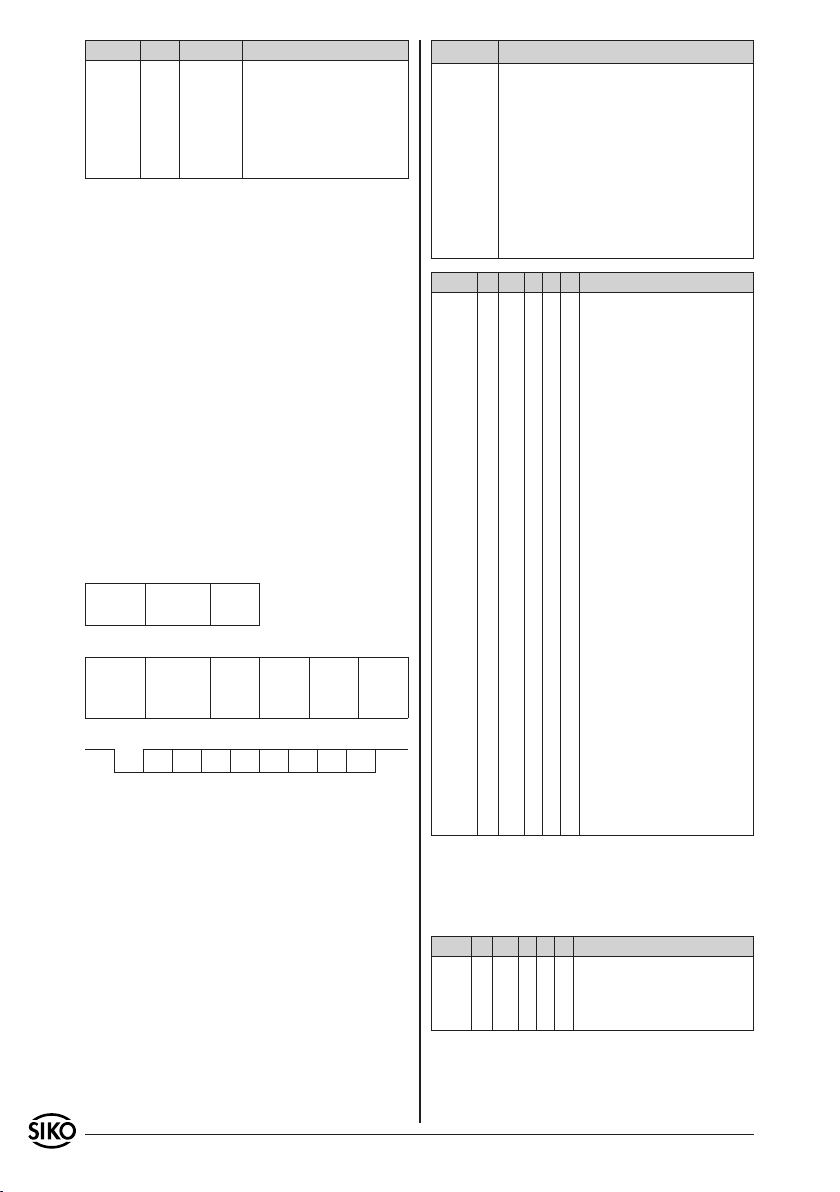
Anschlussbelegung
Die Ausgangssignale und die Versorgungsspannung
werden über eine 9-polige D-SUB-Steckverbindung
geführt (siehe Abb. 1).
Achtung! Um eine stabile elektrische Verbindung
zu gewährleisten, ist es erforderlich, die D-SUB-
Verbindung mit der zugehörigen Schraubverriege-
lung zu fixieren.
•
•
•
•
•
•
Grundversion ohne Optionskarte
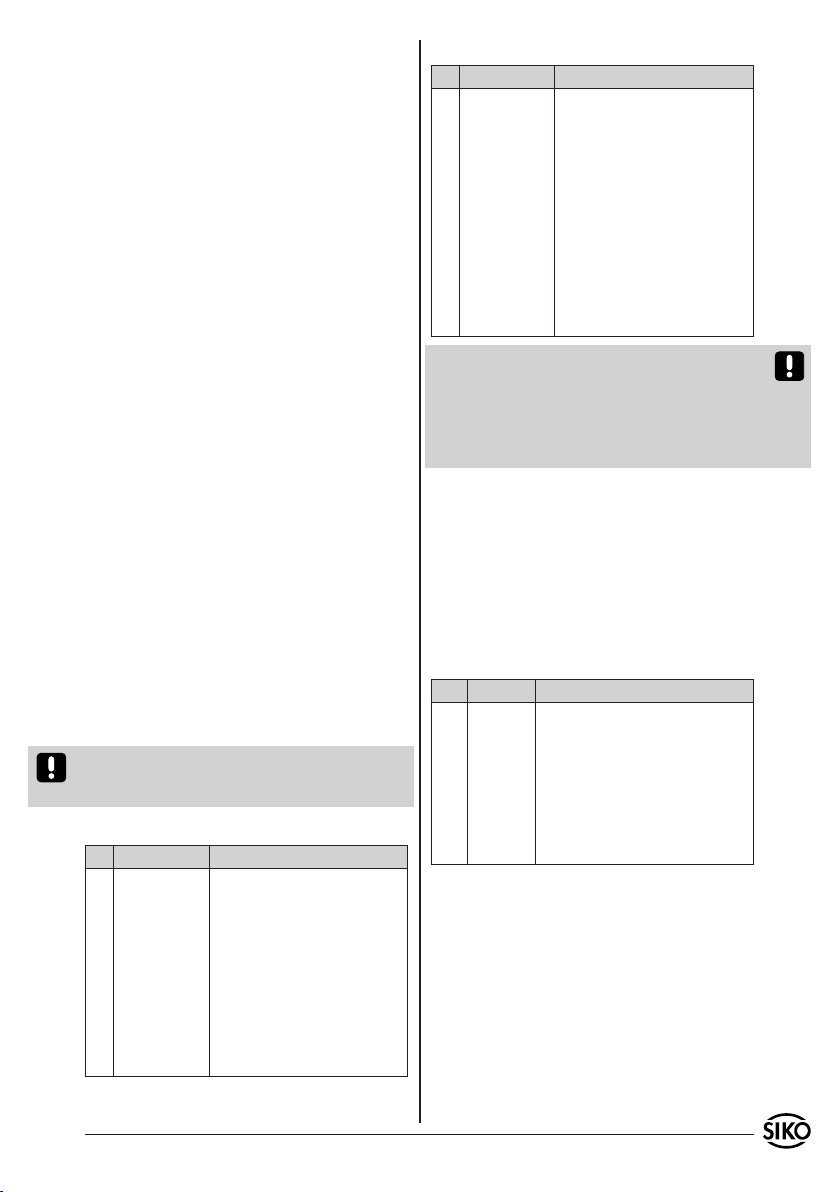
Pin Signal Beschreibung
1 Supply UIN Spannungsversorgung Auswerteelektronik
(24VDC±20%)
2 N.C.
3 DÜA Datenausgang RS485
4 Aktor UIN Schaltausgang 8....30VDC
5 GND für Auswerteelektronik
6 Aktor 0V Schaltausgang 0V, ist nicht mit Pin 5
verbunden
7 N.C.
8 DÜB Datenausgang RS485
9 Aktor UOUT Schaltausgang PNP (max. 0,5A)
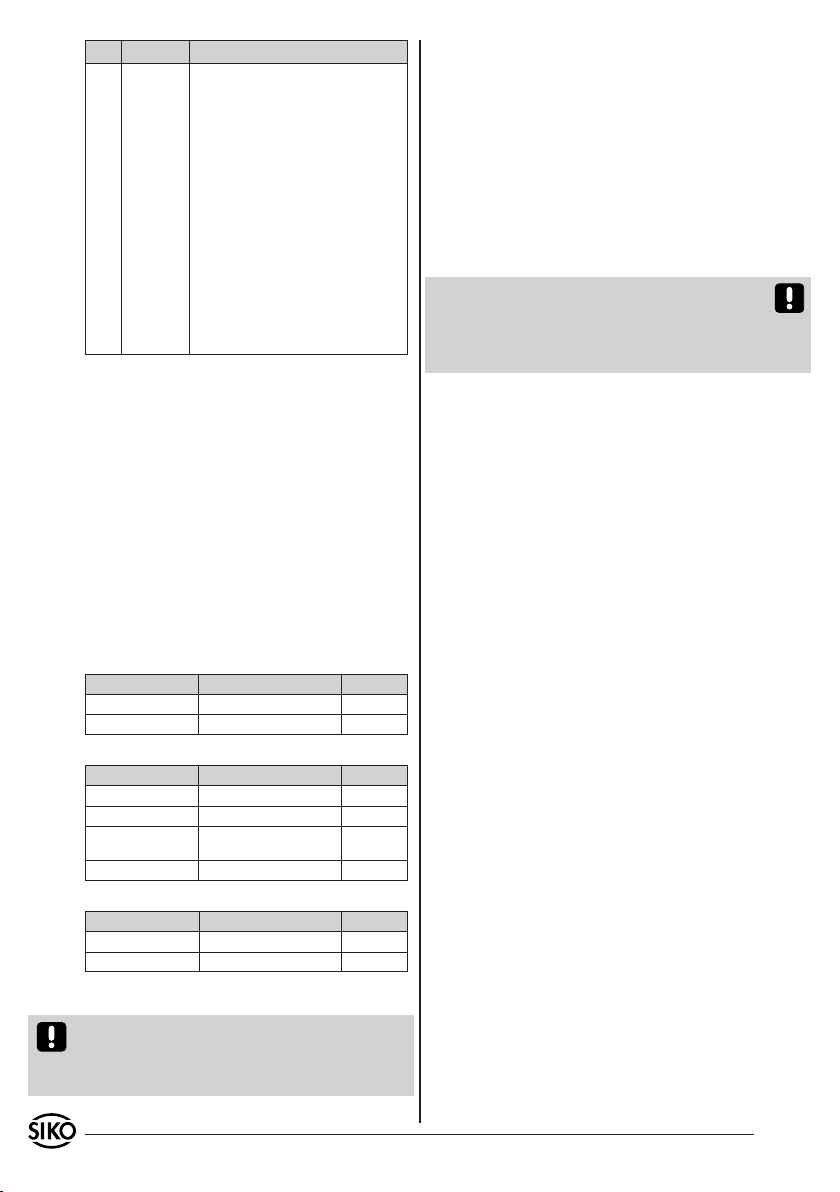
Mit SSI Optionskarte
Pin Signal Beschreibung
1 Supply UIN Spannungsversorgung Auswerteelektronik
(24VDC±20%)
2 Takt+ Positiver SSI Takteingang
3 Daten+
bzw. DÜA
Positiver SSI Datenausgang
Datenausgang RS485
4 Aktor UIN Schaltausgang 8....30VDC
5 GND für Auswerteelektronik
6 Aktor 0V Schaltausgang 0V, ist nicht mit Pin 5
verbunden
7 Takt- invertierter SSI Takteingang
8 Daten-
bzw. DÜB
invertierter SSI Datenausgang
Datenausgang RS485
9 Aktor UOUT Schaltausgang PNP (max. 0,5A)
Achtung! Der gleichzeitige Betrieb von SSI und der
Schnittstelle RS485 ist nicht möglich. Per Dip-Schal-
ter 1 kann die Signalausgabe vor dem Einschalten
des Geräts umgeschaltet werden (siehe Kap. 5):
Schalterstellung "ON" SSI-Mode (default)
Schalterstellung "OFF" RS485-Mode
5. Parametereinstellungen
Die benötigte Konfiguration muss vor dem Einschal-
ten der Betriebsspannung mit den entsprechenden
DIP-Schaltern eingestellt werden, da diese nur
während des Einschaltvorgangs eingelesen werden.
5.1 Betriebsart RS485 ("RS485-Mode")
(DIP-Schalter 1 = OFF; Positionswertausgabe und
Parametrierung über RS485)
DIP Stellung Beschreibung
1 OFF Betriebsart RS485
2 OFF
ON
RS485 Service Standard-Proto-
koll (default)
RS485 SIKONETZ3-Protokoll
3 - - - keine Funktion im RS485-Mode
4 - - - keine Funktion im RS485-Mode
5 OFF Kalibrierschalter
6 OFF Initialisierung

4 ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07
5.2 Betriebsart SSI ("SSI-Mode")
(DIP-Schalter 1 = ON; Positionswertausgabe er-
folgt über SSI)
Die Takteingänge der SSI-Schnittstelle sind op-
toentkoppelt ausgeführt und mit einem 150 Ohm
Serienwiderstand versehen. Sobald ein Taktsignal
anliegt, leuchtet die rote "SSI Takt"-Leuchtdiode;
auch wenn die 24V-Versorgung der Auswerteelek-
tronik noch nicht eingeschaltet ist. Die SSI Daten-
ausgänge entsprechen der RS422.
DIP Stellung Beschreibung
1 ON Betriebsart SSI
2 OFF
ON
Positionswert wird im Gray Code
ausgegeben (default)
Positionswert wird im Binär
Code ausgegeben
3 OFF
ON
Zählrichtung POSITIV (default)
Zählrichtung NEGATIV
4 OFF
ON
Geschwindigkeitsüberwachung in
positiver Zählrichtung (default)
Geschwindigkeitsüberwachung
in negativer Zählrichtung
5 OFF Kalibrierschalter
6 OFF Initialisierung
6. Inbetriebnahme
Nach ordnungsgemäßer Montage, Verdrahtung und
Parametrierung kann die Auswerteelektronik durch
Einschalten der 24V-Supply in Betrieb genommen
werden. Das Gerät durchläuft bei jedem Einschalt-
vorgang eine sogenannte "Startup-Routine".
In dieser Phase werden unter anderem die DIP-
Schalter eingelesen und die Optionskarte (falls
vorhanden) initialisiert, sowie die Betriebsart der
Auswerteelektronik entsprechend der Parametrie-
rung (Kap. 5) bestimmt. Nach ca. 1s wird die Be-
triebsbereitschaft durch konstantes Leuchten der
grünen "Power"-Leuchtdiode signalisiert.
Statusanzeigen der LED's
LED "POWER" (grün)
Anzeige Bedeutung Behandlung
EIN 24VDC EIN -
EIN...AUS...EIN... Low Batt Error Kapitel 7.1
LED "ERROR" (rot)
Anzeige Bedeutung Behandlung
1xEIN...AUS Kalibrierung beendet Kapitel 6.1
EIN Sensor/Bandabstand Kapitel 7.2
3xEIN...Pause...3xEIN.. Initialisierung begonnen
Kalibrierung notwendig
Kapitel 7.2
2xEIN...Pause...2xEIN.. Kommunikation Optionskarte Kapitel 7.3
LED "SSI Takt" (rot)
Anzeige Bedeutung Behandlung
AUS SSI-Takt AUS Kapitel 5.2
EIN SSI-Takt EIN -
6.1 Kalibrierung des Messystems
Achtung! Bei der ASA510 handelt es sich um ein
"quasiabsolutes" Messsystem, d.h. die Informati-
on des Positionswertes ist nicht als Absolutwert
im Maßstab verkörpert!
Daher ist das Kalibrieren des Systems in folgenden
Fällen notwendig:
nach der ersten Inbetriebnahme (Sensormon-
tage)
nach einem Austausch der Pufferbatterie
falls der Sensor in eine Lage außerhalb der Monta-
getoleranzen zum Magnetband gebracht wurde
Bevor die Kalibrierung durchgeführt wird, muss
der Sensor auf den mechanischen Referenzpunkt
gesetzt werden. Mit der Kalibrierung wird der ak-
tuelle Positionswert durch den eingestellten Kalib-
rierwert ersetzt und nichtflüchtig gespeichert.
Achtung! Ab Werk ist dieser Wert auf "0" vorein-
gestellt, daher erscheint standardmäßig der Posi-
tionswert "0". Der Kalibrierwert kann via RS485
(Kapitel 9.1.1) verändert werden und wird eben-
falls nichtflüchtig gespeichert.
6.1.1 Kalibrierung in der Betriebsart RS485:
In der Einstellung Service Standard-Protokoll
(siehe Kapitel 5.1):
Eingabe des Schnittstellenbefehls: "S00000"
(siehe Kapitel 9.1.1).
oder
In der Einstellung SIKONETZ3-Protokoll (siehe
Kapitel 5.1):
Eingabesequenz der Schnittstellenbefehle:32 hex,
48hex, 33hex (siehe Kapitel 9.2.1).
Telegrammbeispiel: Gerät mit Adresse 1 soll
kalibriert werden.
Master sendet (hex): 81 32 63
ASA510 antwortet (hex): 81 32 63
Kurztelegramm an/ von Adresse 1 (81h);
Programmiermode Ein (32h); Prüfbyte (63h)
Master sendet (hex): 81 48 C9
ASA510 antwortet (hex): 81 48 C9
Kurztelegramm an/ von Adresse 1 (81h);
Kalibrierung (48h); Prüfbyte (C9h)
Master sendet (hex): 81 33 62
ASA510 antwortet (hex): 81 33 62
Kurztelegramm an/ von Adresse 1 (81h);
Programmiermode Aus (33h); Prüfbyte (62h)
•
•
•
•
•
1.
2.
3.
ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07 5
oder
Setzen des Dip-Schalters 5 für >1s in Stellung ON,
danach wieder in Stellung OFF zurücksetzen.
6.1.2 Kalibrierung in der Betriebsart SSI:
Setzen des Dip-Schalters 5 für >1s in Stellung ON,
danach wieder in Stellung OFF zurücksetzen.
Die Quittierung des Kalibriervorgangs erfolgt durch
einmaliges kurzes Blinken der "ERROR"-LED.
7. Überwachte Funktionen der ASA510
7.1 Batteriespannung
Sobald die Spannung der internen Pufferbatterie
unter eine Schwelle von ~2,8V sinkt, beginnt die
"Power"-LED zu blinken. Falls die Auswerteelek-
tronik im "RS485-Mode" betrieben wird, wird zu-
sätzlich im Systemstatus Register das Bit 1 gesetzt
(siehe Kapitel 10.1). Die Betriebsart SSI wird von
dieser Warnung nicht beeinflusst.
Achtung! In diesem Fall ist ein Austausch der Bat-
terie notwendig, der im Werk stattfinden muss.
7.2 Sensor-/ Bandabstand
Bei eingeschalteter Betriebsspannung (24V) er-
folgt eine Überwachung des anliegenden Magnet-
felds am Sensorkopf. Bei Unterbrechung wechselt
die ASA510 in einen ERROR-Status, der durch
ständiges Leuchten der "ERROR"-LED signalisiert
wird. Zusätzlich wird der ERROR-Status intern
nichtflüchtig gespeichert, so dass auch nach er-
neutem Wiedereinschalten der Versorgungsspan-
nung diesbezüglich eine Quittierung erfolgen
muss (siehe Kap. 7.2.1 bzw. 7.2.2 entsprechend
der Betriebsart).
Achtung! Diese Funktion ist nicht zur Überwa-
chung von Fertigungs- und Montagetoleranzen
geeignet. Vor der Wiederinbetriebnahme nach Auf-
treten des ERROR-Status muss der Magnetsensor
innerhalb der angegebenen Montagetoleranzen
über das Band gesetzt und auf den mechanischen
Referenzpunkt positioniert werden, da Änderun-
gen der Position möglicherweise nicht korrekt er-
fasst werden konnten.
7.2.1 ERROR-Status der ASA510 in der Betriebs-
art RS485
Im Systemstatus Register werden das Bit 0 sowie
das Bit 2 gesetzt (siehe Kap. 10.1).
In der Einstellung Service Standard-Protokoll (siehe
Kapitel 5.1):
Anstelle des gültigen Positionswertes wird mit den
Befehlen "W" oder "Z" der fixe Wert: "+99999999>"
ausgegeben.
•
•
•
•
In der Einstellung SIKONETZ3-Protokoll (siehe
Kapitel 5.1):
Anstelle des gültigen Positionswertes wird mit
dem Befehl "16h" der fixe Wert: "8388555"
ausgegeben.
Die Quittierung des ERROR-Status erfolgt durch
Initialisierung und anschließende Kalibrierung des
Messsystems:
1. Initialisierung
Durch Setzen des Dip-Schalters 6 für >1s in
Stellung ON, danach wieder in Stellung OFF . Die
"ERROR"-LED beginnt nun zu blinken: 3xEin...
Pause...3xEin...
2. Kalibrierung
Durch Setzen des Dip-Schalters 5 für >1s in Stel-
lung ON, danach wieder in Stellung OFF (Siehe
Kap.6.1). Die "ERROR"-LED erlischt.
Nach erfolgter Kalibrierung wird der Positionswert
wieder gültig ausgegeben, sowie im Systemstatus
Register das Bit 0 und das Bit 2 zurückgesetzt.
Als Alternative zu den DIP-Schaltern kann via
RS485-Schnittstelle der ERROR-Status unter Ver-
wendung des Service Standard-Protokolls wie folgt
quittiert werden:
1. Initialisierung
Durch Eingabe des Befehls "S11100" (siehe Kapitel
9.1.1). Damit werden auch gleichzeitig sämtliche
Parameter auf die Werkseinstellung zurückgesetzt
(default-setting). Bereits jetzt wird wieder ein
Positionswert ausgegeben, der allerdings noch
nicht kalibriert ist.
2. Kalibrierung:
Durch Eingabe des Befehls "S00000" (siehe
Kapitel 6.1).
3. Parametrierung:
Kundenspezifische Parameter z.B. Kalibrierwert,
invertierte Zählrichtung, SIKONETZ3-Adresse...,
die von den default-settings abweichen, müssen
neu programmiert werden (siehe Kapitel 9.1.1).
7.2.2 ERROR-Status der ASA510 in der Betriebs-
art SSI
Im SSI-Mode wird der SSI-Treiber intern abgeschal-
tet, so dass keine Daten mehr ausgegeben werden.
Dies kann eine nachfolgende Steuerung z.B. wie
einen Kabelbruch behandeln. Die Quittierung des
ERROR-Status erfolgt durch Initialisierung und an-
schließende Kalibrierung des Messsystems:
•
•
•
•
•
•

6 ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07
+24V/GND
ASA510
"SSI-Mode"
Takt+/Takt-/
Daten+/Daten- z.B. MA10/3
SSI
Netzteil:
24VDC/
500mA
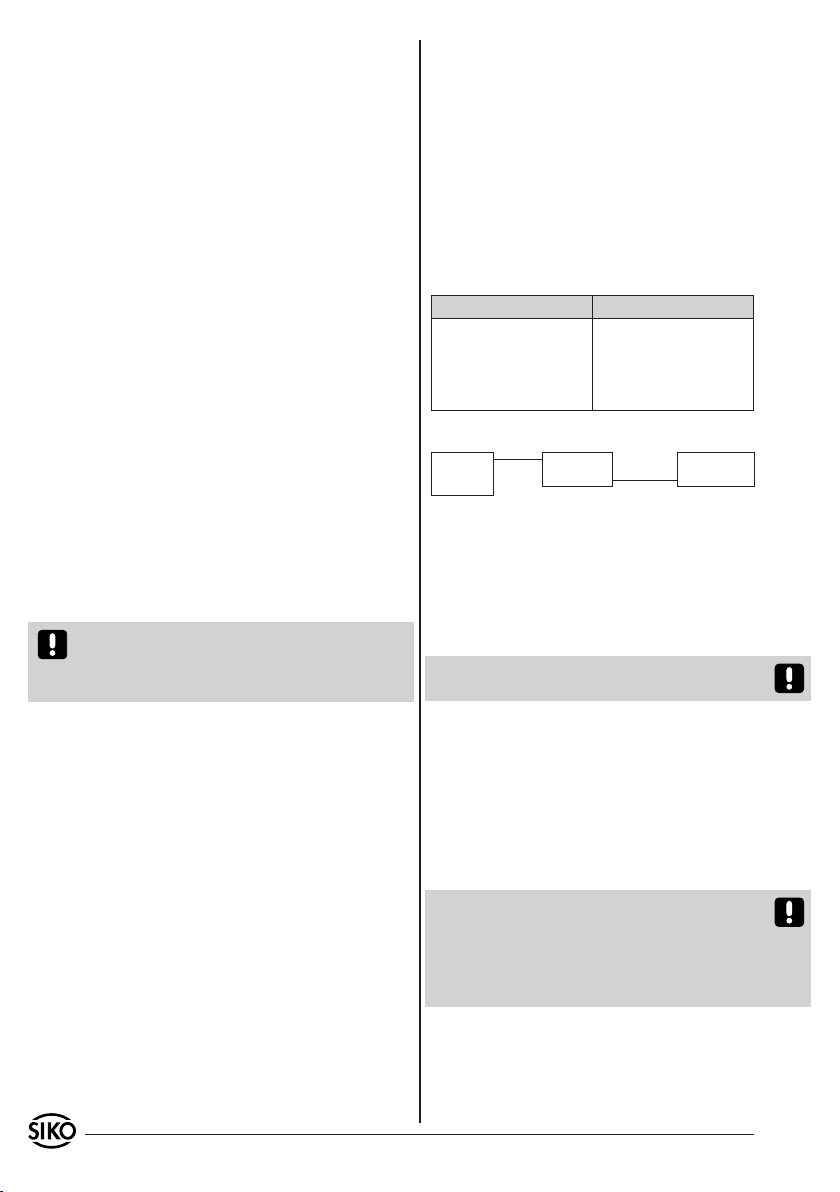
Abb. 8: Blockschaltbild SSI
Konfiguration der SIKO-Messanzeige MA10/3 SSI:
Datenformat "no", Geberbits "24", Singleturnbits
(unrelevant, solange APU=0), Ausgabecode "Gray"
Konfiguration der SIKO-Messanzeige MA10/4 SSI:
Gebertyp "linear", Geberbits "24", Faktor "1.0"
(1/100mm Anzeige), Ausgabecode "Gray"
1. Initialisierung
Durch Setzen des Dip-Schalters 6 für >1s in
Stellung ON, danach wieder in Stellung OFF . Die
"ERROR"-LED beginnt nun zu blinken: 3xEin...
Pause...3xEin...
2. Kalibrierung
Durch Setzen des Dip-Schalters 5 für >1s in Stellung
ON, danach wieder in Stellung OFF (Siehe Kap.
6.1). Die "ERROR"-LED erlischt.
Nach erfolgter Kalibrierung wird der SSI-Treiber
wieder eingeschaltet und der Positionswert gültig
ausgegeben.
7.3 Anschlussleitung Sensorkopf
Bei eingeschalteter Betriebsspannung (24V) wird
die Anschlussleitung des Sensorkopfes ständig
überwacht. Da nach dem Auftreten eines Kabel-
bruchs Positionsänderungen nicht mehr korrekt er-
fasst werden können, wechselt die ASA510 in den
ERROR-Status, der durch ständiges Leuchten der
"ERROR"–LED signalisiert wird. Zusätzlich wird der
ERROR-Status intern nichtflüchtig gespeichert, so
dass auch nach erneutem Wiedereinschalten der
Versorgungsspannung eine Signalisierung gewähr-
leistet ist.
7.3.1 ERROR-Status (Kabelbruch) der ASA510 in
der Betriebsart RS485
Im Systemstatus Register werden das Bit 2 und in
Abhängigkeit der betroffenen Signalleitungen das
Bit 5 bzw. Bit 6 gesetzt (siehe Kap. 10.1).
In der Einstellung Service Standard-Protokoll
(siehe Kap. 5.1): Anstelle des gültigen Positi-
onswertes wird in Abhängigkeit der betroffenen
Signalleitungen mit den Befehlen "W" oder "Z"
der fixe Wert: "+99999998>" bzw. "+99999997>"
ausgegeben.
In der Einstellung SIKONETZ3-Protokoll (siehe Kap.
5.1): Anstelle des gültigen Positionswertes wird
in Abhängigkeit der betroffenen Signalleitungen
mit dem Befehl "16h" der fixe Wert: "8388554"
bzw. "8388553" ausgegeben.
Eine Quittierung des ERROR-Status (Kabelbruch)
kann wie unter Kapitel 7.2.1 (ERROR-Status Mag-
netfeld) beschrieben vorgenommen werden.
7.3.2 ERROR-Status (Kabelbruch) der ASA510 in
der Betriebsart SSI
(siehe Kap. 7.2.2)
Achtung! Da der Fehler je nach Art des Kabelbruches
statisch anliegt oder sporadisch auftreten kann, ist
ein Austausch der Sensorleitung / Sensorkopf not-
wendig, der im Werk vorgenommen werden muss.
•
•
•
•
•
7.4 Funktionsüberwachung der SSI-Optionskarte
in der Betriebsart SSI
Im "SSI-Mode" wird die interne Kommunikation
zwischen der Optionskarte und der Grundkarte
der ASA510 ständig überwacht. Im Falle einer
Störung wird der SSI-Treiber abgeschaltet und im
Systemstatusregister das Bit 4 gesetzt und nicht-
flüchtig gespeichert (siehe Kap. 10.1).Zusätzlich
blinkt die "ERROR-LED" wie folgt: 2 x EIN....Pau-
se...2 x EIN...
Durch Setzen des Dip-Schalters 6 für >1s in Stel-
lung ON, danach wieder in Stellung OFF muss
dieser Fehlerstatus quittiert werden. Eine Kalib-
rierung des Messsystems ist in diesem Fall nicht
notwendig.
8. SSI-Schnittstelle der ASA510
Positionswertausgabe im SSI-Mode
Die integrierte SSI-Schnittstelle der ASA510 er-
möglicht eine synchrone Ausgabe des Positions-
wertes, dessen Datenformat eine Breite von 24Bit
(1Bit (MSB) Vorzeichen + 23Bit Positionswert)
umfasst, die rechtsbündig ausgegeben werden.
Der Ausgabecode erfolgt gray oder binär codiert
(siehe Kapitel 5.2). Alle nachfolgenden Bits (25,
26...) werden mit "0" ausgegeben (siehe Doku-
ment "ssi_hard_signale_asa510.pdf"). Die Da-
tensignale entsprechen der Norm RS422. Die Tak-
teingänge sind optoentkoppelt und entsprechen
ebenfalls der RS422. Die SSI Monoflopzeit beträgt
typ. 20...25µs, daraus ergibt sich die minimale
Taktrate von 62,5kHz. Die maximale Taktrate be-
trägt 1Mhz und wird, auch im Hinblick auf die
Datensicherheit, im Wesentlichen durch die Länge
der Anschlussleitung eingeschränkt. Es können
folgende Richtwerte genannt werden:
Leitungslänge Max. Taktrate
2m 1MHz
10m 800kHz
100m 250kHz
200m 125kHz
Applikationsbeispiel Positionsanzeige

ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07 7
+24V/GND
ASA510 RS232
RXD/TXD/GND
Pegelwandler
RS485 <-> RS232
"RS485-Mode"
DÜA/DÜB/GND
Netzteil:
24VDC/
500mA
PC
Abb. 9: Blockschaltbild RS485
Achtung! Es kann entweder nur eine SSI- oder
eine RS485-Verdrahtung vorgenommen werden!
9. RS485-Schnittstelle der ASA510
Positionswertausgabe und Parametrierung im
RS485-Mode
Die ASA510 kann über die integrierte RS485
Schnittstelle an die jeweiligen Bedürfnisse an-
gepasst werden. Hierfür besteht die Möglichkeit,
einige spezifische Parameter zu programmieren,
die dann nichtflüchtig gespeichert werden und je-
derzeit geändert werden können.
Achtung! In der Betriebsart RS485 werden die Dip
Schalter 3 und 4 während des Einschaltens der
Betriebsspannung nicht ausgewertet. Die damit
verbundenen Funktionen werden ausschließlich
durch die jeweilige Programmierung der Parameter
im Konfigurations Register-0 und Konfigurations Re-
gister-1 bestimmt (siehe Kapitel 10.2 und 10.3).
9.1 Protokollbeschreibung Service Standard-
Protokoll
Das Service Standard-Protokoll ermöglicht die Pa-
rametrierung, Positionswertausgabe und Diagnose
der ASA510. Die Datensignale entsprechen der
Norm RS485. Da das Service Standard-Protokoll
nicht busfähig ist, dürfen keine weiteren Geräte
an der RS485 angeschlossen sein.
Überprüfen Sie vor dem Einschalten der Versorgungs-
spannung die Stellung der Dip-Schalter 1 und 2:
Dip-Schalter 1 = OFF (RS485-Mode)
Dip-Schalter 2 = OFF (Service Standard-Protokoll)
Stellen Sie über einen Pegelwandler (z.B. Fa. Spec-
tra Typ I-7520) eine Verbindung zwischen der seri-
ellen RS232 Schnittstelle Ihres PCs und der RS485
Schnittstelle der Auswerteelektronik her.
Nachdem die Stromversorgung der ASA510 ein-
geschaltet wurde, können Sie sofort mit der Pro-
grammierung beginnen, indem Sie:
ein geeignetes Terminalprogramm (z.B. "sikoterm.
exe") starten und Ihre Befehle gemäß der Tabelle
"Befehlsliste-Servicebetrieb" manuell eingeben
(siehe Kap. 9.1.1). Berücksichtigen Sie dabei die
vorgegebenen Schnittstellenparameter.
oder
das Programmiertool "asa_demo.exe" starten.
Es ermöglicht Ihnen, bei gleichzeitiger Anzeige
sämtlicher relevanter Daten der Auswerteelek-
tronik, Ihre Parameter über die Funktionstasten
einzugeben. Zu berücksichtigen sind die optiona-
len Übergabeparameter, mit denen das Programm
"asa_demo.exe" aufgerufen werden kann.
•
•
Die Programme "sikoterm.exe" und "asa_demo.
exe", sowie ergänzende Hinweise zu deren Bedie-
nung können Sie bei SIKO anfordern oder in ihrer
aktuellsten Version aus dem Internet downloaden
unter der Adresse: http://www.siko.de/download
Applikationsbeispiel PC/ Terminal
9.1.1 Befehlsliste Service Standard-Protokoll
Prinzipiell funktioniert die Anwendung so, dass
der PC (oder ein Terminal) einen ASCII-Befehl
(Buchstabe) ggf. mit zusätzlichen Zahlenparame-
tern absendet. Die ASA510 sendet daraufhin die
entsprechende Antwort (siehe folgende Tabelle):
Parameter: 19200 Baud, kein Parity, 8 Bit,
1Stoppbit, ohne Handshake
Ausgabe: ASCII (falls nicht anders angegeben)
Wertebereiche: 2/3 Byte: 0...65535 / 0... ±223
Zur Eingabe: Es werden große und kleine Buch-
staben akzeptiert.
Zur Ausgabe: Mit Ausnahme des Befehls "W" wer-
den alle Antworttelegramme mit
einem CR (=hex13) vervollständigt.
Befehl Länge Antwort Beschreibung
A0 2/10 "xxxxxxxx>" Hardwareversion
A1 2/7 "xxxxx>" Softwareversion
A2 2/10 "xxxxxxxx>" Hardwareversion der Optionskarte
A3 2/7 "xxxxx>" Softwareversion der Optionskarte
B 1/11 "+xxxxxxxx>" Positionswert ohne Korrekturwerte
Ey 2/11 "+xxxxxxxx>" Parameter ausgeben
y = Adresse (0...6)
x = dezimaler Wert
y = 0: Positionswert
y = 1: PWM Wert
y = 2: Nullpunktwert
y = 3: Kalibrierwert
mit Optionskarte MWU/MWI:
y = 4: 12Bit PWM Minimalwert
y = 5: 12Bit PWM Maximalwert
y = 6: mechanischer Endwert
Fy+xxxxxxx 10/2 ">" Parameter eingeben
y = Adresse (0...6)
x = dezimaler Wert (±0...9999999)
y = 2: Nullpunktwert (default=0)
y = 3: Kalibrierwert (default=0)
mit Optionskarte MWU/MWI:
y = 4: 12Bit PWM Minimalwert
(default=0)
y = 5: 12Bit PWM Maximalwert
(default=4095)
y = 6: mechanischer Endwert
(default=0)

8 ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07
Befehl Länge Antwort Beschreibung
K 1/- Software Reset
M 1/4 "XX>" SIKONETZ3 Adresse ausgeben
(default = 01)
Nxx 3/2 ">" SIKONETZ3 Adresse zweistellig
übergeben (xx = dezimaler Wert
01 ... 31)
Ry_xxxxxxx 11/2 ">" Konfigurations Register eingeben
y = 0: Register-0
y = 1: Register-1
_ : Trennzeichen
xxxxxxx = Bit 7, 6, 5 ... 0: Re-
gisterinhalt
S00000 6/2 ">" Positionswert auf Kalibrierwert
setzen
S11100 6/2 ">" Auslieferungszustand wiederher-
stellen (default-setting):
Softwarefilter: EIN
ADC Kanal: High Resolution
Zählrichtung: POSITIV
SSI Code: Gray
RS485 Startmessage: NO
ERROR-Status löschen
Kalibrierdaten löschen
T0 2/2 ">" Zählrichtung POSITIV (default)
T1 2/2 ">" Zählrichtung NEGATIV
W 1/4 "xxxx" Absoluter Positionswert im Bi-
när-Code
X 1/6 "0xyy>" Systemstatus Register hexadezi-
mal ausgeben
"0x Bit7..4 Bit3..0"
Y0 2/6 "0xyy>" Konfigurations Register-0 hexa-
dezimal ausgeben
"0x Bit7..4 Bit3..0"
Y1 2/6 "0xyy>" Konfigurations Register-1 hexa-
dezimal ausgeben
"0x Bit7..4 Bit3..0"
Z 1/11 "±xxxxxxxx>" Absoluter Positionswert
9.2 Protokollbeschreibung SIKONETZ3
Das SIKONETZ3-Protokoll ermöglicht die Parame-
trierung und Positionswertausgabe der ASA510.
Die Datensignale entsprechen der Norm RS485. Da
jedes Telegramm eine Adresse beinhaltet, können
bis zu 31 Geräte über einen Bus angesprochen
werden. Im Auslieferungszustand ist diese Adres-
se bei jedem Gerät auf den Wert "01" eingestellt.
Bevor das Gerät am Bus betrieben wird, sollten
deshalb zunächst via Service Standard-Protokoll
(siehe Kapitel 9.1) sämtliche Parameter (Zähl-
richtung, Kalibrierwert...), insbesondere aber die
Geräteadresse (01...31) umprogrammiert werden.
Nach dieser Grundparametrierung kann schließlich
auf das SIKONETZ3-Protokoll umgeschaltet, und
somit in den Busbetrieb gewechselt werden (Dip-
Schalter 2).
Das SIKONETZ3-Protokoll ist als Master-Slave-Sys-
tem aufgebaut, in dem die ASA510 immer als Slave
eingeordnet ist. Es existieren 2 Telegrammlängen:
3Byte:
Adress-
Byte
Befehl Prüf-
Byte
6 Byte:
Adress-
Byte
Befehl Daten-
Byte
Low
Daten-
Byte
Middle
Daten-
Byte
High
Prüf-
Byte
Das Adressbyte setzt sich wie folgt zusammen:
1 0 A0 A1 A2 A3 A4 0 RR L 1
Start Stopp
Das Prüfbyte wird als EXOR-Verknüpfung der restli-
chen 2 bzw. 5 Bytes des Telegramms erzeugt.
A0 ... A4: Binärkodierte Adresse 1 ... 31; Adresse
0 definiert für Master
RR: Rundruf-Bit = 1 Befehl gilt für alle Ge-
räte, Geräte antworten nicht
L: Längen-Bit: 1 = Kurztelegramm (3 Byte);
0 = Langtelegramm (6 Byte)
9.2.1 Befehlsliste SIKONETZ3-Protokoll
Parameter: 19200 Baud, no Parity, 8 Bit, 1 Start-
bit, 1 Stoppbit
Spalte Erläuterung
Hex: Hexadezimalwert des Befehls
TX: Telegrammlänge vom Master an ASA510
RX: Telegrammlänge von ASA510 an Master
S: Übergebener Parameter wird nichtflüch-
tig im Gerät gespeichert
P: Für diesen Befehl ist es notwendig, den
Programmiermode einzuschalten (Bef
0x32; 0x33)
R: Dieser Befehl ist rundruffähig
Hex TX RX S P R Funktion
16 Hex 3 6 - - - Positionswert auslesen
18 Hex 3 6 - - - Kalibrierwert auslesen
1b Hex 3 6 - - - Gerätekennung auslesen
D-Byte 1: Kennung = 24;
D-Byte 2: Softwareversion;
D-Byte 3: Hardwareversion
1d Hex 3 6 - - - Zählrichtung auslesen
Wert = 0: "auf" (+);
Wert = 1: "ab" (-)
28 Hex 6 6 S P - Kalibrierwert programmieren
Wert auf den der Positionswert ge-
setzt wird wenn das Gerät kalibriert
wird (Bef 0x48).
2d Hex 6 6 S P - Zählrichtung programmieren
Wert = 0: "auf" (+);
Wert = 1 "ab" (-)
32 hex 3 3 - - - Programmiermode Ein
Programmiermode muss "Ein" sein,
um Parameter (0x28 und 0x2d) zu
programmieren.
ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07 9
Hex TX RX S P R Funktion
33 Hex 3 3 - - - Programmiermode Aus
Default
3a Hex 3 6 - - - Systemstatus ausgeben
3b Hex 3 3 - - - Systemstatus löschen
Systemstatus Bytes 2 und 3 werden
gelöscht.
48 Hex 3 3 S P - Positionswert wird auf Kalibrier-
wert gesetzt.
4f Hex 3 3 - - R Positionswert einfrieren
Positionswert wird eingefroren. Zu-
stand wird durch Auslesen des Po-
sitionswertes zurückgesetzt. Dient
zum synchronisierten Auslesen
mehrerer Geräte.
Fehlermeldungen
Der Slave (Sensor) erkennt Übertragungs- bzw.
Eingabefehler und sendet folgende Fehlermeldun-
gen:
Hex TX RX S P R Funktion
82 Hex - 3 - - - Datenübertragungsfehler Prüfsumme
84 Hex - 3 - - - Unzulässiger oder unbekannter Befehl
88 Hex - 3 - - - Unzulässiger Wert (Parameter Pro-
grammierung)
Synchronisation:
Eine Byte-/ Telegrammsynchronisation erfolgt
über "Timeout": Der Abstand der einzelnen Bytes
eines Telegramms dürfen einen Wert von 10ms
nicht übersteigen. Falls ein angesprochenes Ge-
rät nicht antwortet, so darf der Master frühestens
nach 30ms erneut ein Telegramm senden.
Telegrammbeispiel:
Positionswert des Geräts mit Adresse 7 soll ausge-
geben werden.
Master sendet (hex): 87 16 91
Kurztelegramm an Adresse 7 (87h); Positionswert
auslesen (16h); Prüfbyte (91h)
ASA510 antwortet (hex): 07 16 03 02 00 10
Langtelegramm von Adresse 7 (07h); Positions-
wert auslesen (16h); Wert 203h = 515 dez (03 02
00h); Prüfbyte (10h).
10. Übersicht Bit-Zuordnung der ein-
zelnen Register
10.1 8Bit Systemstatus Register
Bit Default Bemerkungen
Bit 0 0 ERROR-Bit:
-wird gesetzt, sobald Sensor/ Bandab-
stand > ~ 3mm (siehe Kap. 7.2).
Bit Default Bemerkungen
Bit 1 0 LoBatt-Bit
-wird gesetzt, sobald Li-Batterie < 2,8V
-selbstrückstellend, nachdem die Batte-
rie ersetzt wurde.
Bit 2 0 -wird gesetzt, sobald Verfahrgeschwin-
digkeit in der zu überwachenden Rich-
tung > ~ 25m/min.
-selbst rückstellend, sobald Verfahrge-
schwindigkeit < ~ 25m/min.
Bit 3 0 (für interne Zwecke: Software Counter
Offset)
Bit 4 0 -wird gesetzt, falls ein interner Kom-
munikationsfehler mit der Optionskarte
erkannt wurde (siehe Kap. 7.4).
Bit 5 0 -wird gesetzt, falls eine Unterbrechung
der Sensoranschlussleitung (Feinwert)
erkannt wurde (siehe Kap. 7.3).
Bit 6 0 -wird gesetzt, falls eine Unterbrechung
der Sensoranschlussleitung (Grobwert)
erkannt wurde (siehe Kap. 7.3).
Die Fehlerbits 0, 4, 5, 6 bleiben gesetzt bis ent-
sprechende Quittierung erfolgte.
10.2 8Bit Konfigurations Register-0
Bit Default Bemerkungen
Bit 0 0 wenn gesetzt, wird nach Einschalten
der +24V eine Kennung über die RS485
(sofern aktiv) gesendet => Startmessage
"HI"
Bit 1 0 Zählrichtung:
0 = POSITIV; 1 = NEGATIV
Bit 2 1 SSI-Code:
0 = Binär; 1 = Gray
Bit 3 1 (für interne Zwecke: Softwarecounter)
Bit 4 0 (für interne Zwecke: ADC channel Se-
lect)
Bit 5 1 Softwarefilter:
0 = AUS; 1 = EIN
Bit 6 0 not used
Bit 7 0 not used
10.3 8Bit Konfigurations Register-1
Bit Default Bemerkungen
Bit 0 ... 4 0 not used
Bit 5 1 Geschwindigkeitsüberwachung:
0= AUS; 1 = EIN
Bit 6 0 Richtung der Geschwindigkeitsü-
berwachung:
0 = POSITIV; 1 = NEGATIV
Bit 7 0 Geschwindigkeitsüberwachung alle
Richtungen:
0 = AUS; 1 = EIN
10 ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07
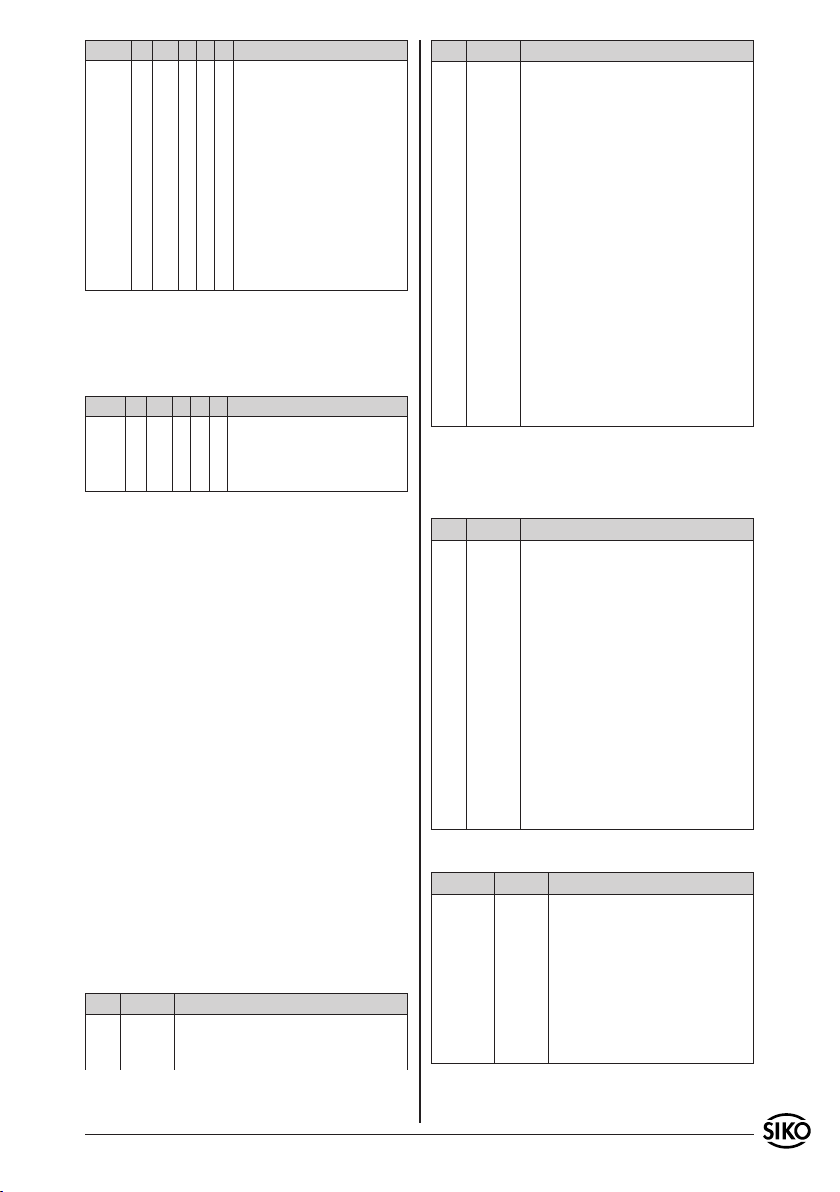
Abb. 10: Prinzipschaltbild Aktorausgang
PIN 4 (Aktor UIN
max. 30VDC)
PIN 9 (Aktor OUT
30V/0.5A)
PIN 6 (Aktor 0V)
11. Aktorausgang der ASA510
Der Schaltausgang der ASA510 ist zu deren 24V-
Supply optoentkoppelt ausgeführt. Deshalb muss
an PIN 4 des D-SUB (Aktor UIN) eine externe Span-
nung (max. 30VDC) angelegt werden, sowie an PIN
6 die zugehörige GND. An PIN 9 (Aktor OUT) wird
das Potential Aktor UIN durchgeschaltet. Die max.
Belastbarkeit beträgt ~ 0,5A.
Geschwindigkeitsabhängiger Aktorausgang
Sofern das Bit 5 des Konfigurations Register-1
gesetzt ist, wird die Verfahrgeschwindigkeit des
Sensorkopfes überwacht. Bei einer Verfahrge-
schwindigkeit > 25m/min oder bei Auftreten eines
ERROR-Status (siehe Kapitel 7.2 und 7.3), wird
der Ausgang "Aktor OUT" des Sensors hochohmig
geschaltet und im Systemstatus Register das Bit
2 gesetzt. Nach Verringerung der Geschwindigkeit
auf < 25m/min wird das Bit 2 selbständig gelöscht
und der Aktorausgang "Aktor OUT" gegen "Aktor
UIN" geschlossen.
12. Fehlerbehandlung
Typische Fehler, die bei Anbau und Betrieb auf-
treten können:
Die ASA510 ist nicht, oder nicht korrekt ange-
schlossen (Pinbelegung siehe Kap. 4).
Die Abstandstoleranz zwischen Sensor/ Band
wurde nicht eingehalten (über die gesamte
Messstrecke!) oder der Sensor streift auf dem
Magnetband.
Kabelunterbrechung/ Abtrennung durch scharfe
Kanten/ Quetschung.
Der Sensor ist mit der aktiven Seite vom Band
abgewandt montiert (siehe Abb.7).
Sensor und Band sind falsch zueinander ausge-
richtet (Siehe Kap. 3.2). Magnetische Felder in
unmittelbarer Nähe der Messfläche verfälschen
die Messwerte, ggf. sind Maßnahmen zur Ab-
schirmung nötig.
Falsche Messwerte infolge EMV-Störungen (siehe
Kap. 4)
Die eingestellte Betriebsart entspricht nicht der
angeschlossenen Hardware.
•
•
•
•
•
•
•
ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07 11
Fig. 1: Mounting / connections
Connection
possibility
for potential
equalization
ENGLISH
1. Warranty information
In order to carry out installation correctly, we
strongly recommend this document is read very
carefully. This will ensure your own safety and
the operating reliability of the device.
Your device has been quality controlled, tested
and is ready for use. Please observe all warnings
and information which are marked either directly
on the device or specified in this document.
Warranty can only be claimed for components
supplied by SIKO GmbH. If the system is used
together with other products, there is no warranty
for the complete system.
Repairs should be carried out only at our works.
If any information is missing or unclear, please
contact the SIKO sales staff.
2. Identification
Please check the particular type of unit and type
number from the identification plate. Type number
and the corresponding version are indicated in the
delivery documentation.
e.g. ASA510-0023
version number
type of unit
3. Installation
For mounting, the degree of protection specified
must be observed. If necessary, protect the unit
against environmental influences such as sprayed
water, dust, knocks, extreme temperatures.
3.1 Mounting device
The unit has been designed for screw fixation - via
•
•
•
•
the lateral mounting tabs / bores. (s. Fig. 1).
User Information
ASA510 + MB500
Translation module
3.1 Mounting the magnetic strip
The mounting surface / measuring track must
be flat. Buckles or bumps will lead to inaccurate
measurement results. Please protect the magnetic
strip from mechanical damage (e.g. against shocks
and vibration).
For technical reasons the strip should be approx.
100mm longer than the actual measuring distance.
Attention! To guarantee optimal adhesion oil,
grease dust etc. must be removed by using clean-
sing agents which evaporate without leaving resi-
dues. Suitable cleansing agents are e.g. ketones
(acetone) or alcohols; the companies Loctite and
3M can both supply such cleaning liquid. Make
sure that the surface to be glued is dry and apply
the strip with maximum pressure. Glueing should
preferably be carried out at temperatures between
20°C to 30°C and in dry atmosphere.
Advice! When applying long pieces of magnetic
strip do not immediately remove the complete
protective foil, but rather peel back a short part
from the end sufficient to fix the strip. Now align
the strip. As the protective strip is then peeled
back and out press the tape firmly onto the moun-
ting surface. A wall paper roller wheel could be
used to assist in applying pressure onto the mag-
netic strip when fixing it in position.
Mounting steps (Fig. 2)
Carefully clean the mounting surface (1)
Remove protective foil (2) from the adhesive side
of the magnetic tape (3).
Stick down the magnetic strip (4) while ensuring
correct alignment.
•
•
•
12 ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07
Fig. 2: Mounting the magnetic strip
Fig. 3 Fig. 4
Fig. 5 Fig. 6
Fig. 7: Mounting tolerances
Positive travel
direction (default)
active side
0.1mm...2.0mm
Direction of out-
going cable
Gap sensor/magnetic strip
<1° <3°
maximum alignment error
<3°
±1.0
Carefully clean the surface of the magnetic strip.
Remove protective foil (6) from adhesive tape on
the cover strip (5).
Fix cover strip (both ends should slightly over-
lap).
Also fix cover strip’s ends to avoid unintentional
peeling.
•
•
•
•
deviation are less important than errors resulting
from strip and sensor tolerances.
The max. allowable distance between sensor
and magnetic strip (without cover strip) is
2mm. When using a cover strip, the gap is re-
duced by the thickness of the cover strip in-
cluding its adhesive tape. The Sensor must not
touch the magnetic strip.
An accumulation of the different possible moun-
ting tolerances should be avoided.
Attention! Do not expose the magnetic strip to
magnetic fields. Any direct contact of the magnetic
strip with magnetic fields (e.g. adhesive magnets
or other permanent magnets) is to be avoided. The
same applies to the sensor during operation.
Mounting examples
Mounting with chamfered ends (fig. 3) is not re-
commended unless the strip is installed in a safe
and protected place without environmental influ-
ences. In less protected mounting locations the
strip may peel. There we recommend mounting
accord. to fig. 4 and fig. 5.
Mounting in a groove (fig. 6) best protects the
magnetic strip. The groove should be deep enough
to totally embed the magnetic strip. (e.g. SIKO-
PSA-rail)
3.3 Sensor mounting
The sensor's position relative to the magnetic strip
is exactly defined. The correct gap between sen-
sor and magnetic strip must be maintained over
the total travel distance, irrespective whether the
strip or sensor moves. (fig. 7).
Within the defined limits (fig. 7), errors due to
4. Electrical connection
Live connections must neither be closed nor
removed!
Wiring must only be carried out with power off!
Check all lines and connections before switching
on the equipment.
To ensure flawless functioning of the device,
expert connection to potential equalization is
indispensable. To enable this, each a ring eye
for connecting a max. 2.5mm² cable, alternately
a tab as well as a tooth lock washer are enclosed
in the delivery. The connection should be as short
as possible (see fig.1).
Interference and distortion
All connections are protected against the effects
of interference. The location should be selected
to ensure that no capacitive or inductive in-
terferences can affect the sensor or the con-
nection lines! Suitable wiring layout and choice
of cable can minimise the effects of interference
•
•
•
•
ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07 13
(e.g. interference caused by SMPS, motors, cyclic
controls and contactors).
Necessary measures:
Only screened cable should be used. Screen should
be connected to earth at both ends. Wire cross
section is to be at 0,25mm².
Wiring to the screen and ground (0V) must
be secured to a good point. Ensure that the
connection of the screen and earth is made to
a large surface area with a sound connection to
minimise impedance.
The system should be positioned well away from
cables with interference; if necessary a protective
screen or metal housing must be provided. The
running of wiring parallel to the mains supply
should be avoided.
Contactor coils must be linked with spark sup-
pression.
To enhance interference resistance of the ASA510,
the service line for supply voltage and output
signals must be equipped with a ferrite sleeve
mounted at the smallest possible distance from the
D-SUB connection. The sleeve should be chosen
so as to fit exactly since the external diameter
depends on the type of service line used.
Extension or splitting of the senor cable is not
permitted.
Power supply: 24VDC -20% ... +20%
Power consumption: < 5 Watt
Connection of the translation module
Output signals and voltage supply are connected
to the 9-poles D-Sub terminal strip (see fig. 9).
Attention! Fixing of the D-Sub plug to the socket
is to be made by using the screws on the plug. This
will guarantee a neat and effective connection.
Basic version without option card
Pin Signal Description
1 Supply UIN Voltage supply of translation module
(24VDC±20%)
2 N.C.
3 DÜA RS485 data output
4 Actuator UIN 8....30VDC switching output
5 GND for translation module
6 Actuator 0V 0V switching output, not connected
with pin 5
7 N.C.
8 DÜB RS485 data output
9 Actuator UOUT PNP switching output (max. 0,5A)
•
•
•
•
•
•
With SSI option card
Pin Signal Description
1 Supply UIN ower supply of translation module
(24VDC±20%)
2 Cycle+ Positive SSI cycle input
3 Data+
or DÜA
Positive SSI data output
RS485 data output
4 Actuator UIN 8....30VDC switching output
5 GND for translation module
6 Actuator 0V 0V switching output, not connected
with pin 5
7 Cycle- inverted SSI cycle input
8 Data-
or DÜB
inverted SSI data output
RS485 data output
9 Actuator UOUT PNP switching output (max. 0,5A)
Attention! Synchronous operation of SSI and
RS485 interface is not possible. The signal output
can be switched over via DIP switch 1 before tur-
ning on the device (see chapter 5):
Switch setting "ON" SSI mode (default)
Switch setting "OFF" RS485 mode
5. Parameter setup
Since the required configuration is loaded only
during the start of the device, it must be set up
by means of the appropriate DIP switches prior to
switching on the operation voltage.
5.1 RS485 Operating mode ("RS485 mode")
(DIP switch 1 = OFF; Output of position value and
parameterization via RS485)
DIP Position Description
1 OFF RS485 operating mode
2 OFF
ON
RS485 Service standard protocol
(default)
RS485 SIKONETZ3 protocol
3 - - - No function in RS485 mode
4 - - - No function in RS485 mode
5 OFF Calibration switch
6 OFF Initialization
5.2 SSI operating mode ("SSI mode")
(DIP switch 1 = ON; output of position value via
SSI)
The cycle inputs of the SSI interface have been re-
alised opto-decoupled and have a 150 Ohm series
resistance. The red "SSI cycle" lightemmitting di-
ode is lighted as soon as a cycle signal is applied,
even if the 24 V supply of the translation module
has not been switched on yet. The SSI data out-
puts correspond to the RS422 interface.
14 ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07
DIP Position Description
1 ON SSI mode
2 OFF
ON
Position value is output in Gray
Code (default)
Position value is output in bi-
nary code
3 OFF
ON
POSITIVE counting direction
(default)
NEGATIVE counting direction
4 OFF
ON
Speed monitoring in positive
direction (default)
Speed monitoring in negative
direction
5 OFF Calibration switch
6 OFF Initialization
6. Commissioning
After proper installation, wiring and paramete-
rization, the translation module can be commis-
sioned by turning on the 24V supply. With each
power-on procedure, the device goes through a
so-called "startup routine". In this phase, the DIP
switches are read and the option card (if present)
is initialised; furthermore, the translation module
is determined depending on the parameterization
(chapter 5). Constant lighting of the green "Po-
wer" LED after approx. 1 s indicates that the de-
vice is ready for operation.
Status lights of the LEDs
"POWER" LED (green)
Display Meaning Action
ON 24VDC ON -
ON...OFF...ON... Low Batt Error chapter 7.1
"ERROR" LED (red)
Display Meaning Action
1xON...OFF Calibration completed chapter 6.1
ON Sensor/strip gap chapter 7.2
3xON...pause...3xON.. Initialization started
Calibration required
chapter 7.2
2xON...pause...2xON.. communication option card chapter 7.3
LED "SSI Cycle" (red)
Display Meaning Action
OFF SSI cycle OFF chapter 5.2
ON SSI cycle ON -
6.1 Calibration of the measuring system
Attention! The ASA510 is a "quasi-absolute"
measuring system, i.e. the information of the po-
sition value is not represented on the scale as an
absolute value!
Therefore, calibration of the system is required in
the following cases:
after first commissioning (sensor installation)
after replacing the buffer battery
if the sensor was brought into a position outside
the mounting tolerances to the magnetic strip.
The sensor must be set to the mechanical refe-
rence point prior to performing calibration. By
calibrating, the actual position value is replaced
by the calibration value set and is stored in the
non-volatile memory.
Attention! This value is factory-set to "0"; there-
fore, the position value "0" is displayed as the de-
fault value. The calibration value can be changed
via RS485 (chapter 9.1.1) and is also stored in the
non-volatile memory.
6.1.1 Calibration in the RS485 mode
In the Service Standard Protocol setting (see
chapter 5.1):
Enter the "S00000" interface command (see
chapter 9.1.1).
or
In the SIKONETZ3 Protocol setting (see chapter
5.1):
Entry sequence of interface commands: 32 hex,
48hex, 33hex (see chapter 9.2.1).
Telegram example: To calibrate device with
address 1.
Master sends (hex): 81 32 63
ASA510 replies (hex): 81 32 63
Short telegram to/ from address 1 (81h);
Programming mode ON (32h); sense byte (63h)
Master sends (hex): 81 48 C9
ASA510 replies (hex): 81 48 C9
Short telegram to/ from address 1 (81h);
Calibration (48h); sens byte (C9h)
Master sends (hex): 81 33 62
ASA510 replies (hex): 81 33 62
Short telegram to/ from address 1 (81h);
Programming mode Off (33h); sense byte (62h)
or
Set the DIP switch 5 in ON position for >1s, then
reset to OFF position.
6.1.2 Calibration in the SSI mode
Set the DIP switch 5 in ON position for >1s, then
reset to OFF position.
The calibration process is acknowledged by one
short blinking of the "ERROR" LED.
•
•
•
•
•
1.
2.
3.
•
•
ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07 15
7. Monitored ASA510 functions
7.1 Battery voltage
The "Power" LED starts blinking as soon as the
voltage of the internal buffer battery falls below
the threshold of ~2,8V. If the translation module
is operated in the "RS485 mode", bit 1 is additio-
nally set in the Register system status (see chapter
10.1). The SSI operating mode remains uninflu-
enced by this alert.
Attention! The battery must be replaced by SIKO
in this case.
7.2 Sensor / strip gap
The magnetic field applied to the sensor head is
being monitored as long as the operating voltage
(24V) is turned on. In case of interruption the
ASA510 changes to a ERROR state signalised by
permanent lighting of the "ERROR" LED. Additio-
nally, the ERROR state is stored in the non-volati-
le internal memory, requiring acknowledgement of
the error even after the supply voltage was turned
on again (see chapter 7.2.1 or 7.2.2 depending on
the operating mode).
Attention! This function is not suited for moni-
toring production or mounting tolerances. The
magnetic sensor must be placed above the strip
within the specified mounting tolerances and po-
sitioned on the mechanical reference point before
commissioning after the ERROR state has occurred
since changes of position might not have been
correctly recorded.
7.2.1 ERROR status of the ASA510 in the RS485
mode
In the Register system status bit 0 as well as bit
2 are set (see chapter 10.1).
In the Service standard protocol (see chapter 5.1):
Instead of the valid position value the fixed value
"+99999999>" is output by using the "W" or "Z"
commands.
In the SIKONETZ3 protocol setting (see chapter 5.1):
Instead of the valid position value the fixed
value "8388555" is output by using the "16h"
command.
The ERROR status is acknowledged by initializati-
on with subsequent calibration of the measuring
system:
1. Initialization
By setting the DIP switch 6 to the ON position for
>1s, then back to OFF position. Now, the "ERROR"
LED starts blinking: 3xON...pause...3xON...
•
•
•
•
2. Calibration
By setting the DIP switch 5 to the ON position for
>1s, then back to the OFF position (see chapter
6.1), the "ERROR" LED goes out.
After calibration, the valid position value is out-
put again and bit 0 and bit 2 are reset in the
Register system status.
As an alternative to using DIP switches, the ERROR
status may be acknowledged by using the Service
standard protocol as follows:
1. Initialization
By entering the "S11100" command (see chapter
9.1.1). By doing this, all parameters will be reset
to the factory settings (default-setting). A posi-
tion value is instantly output, which, however, is
not yet calibrated.
2. Calibration:
By entering the "S00000" command (see chapter
6.1).
3. Parameterization:
Customer-specific parameters, e.g., calibration
value, inverted counting direction, SIKONETZ3
address..., which deviate from the default-settings
must be re-programmed (see chapter 9.1.1).
7.2.2 ERROR status of the ASA510 in the SSI
mode
In the SSI mode, the SSI driver is turned off inter-
nally so that no more data is output. This may tre-
at a subsequent control like a cable break. The ER-
ROR status is acknowledged by initialization and
subsequent calibration of the measuring system:
1. Initialization
By setting the DIP switch 6 to the ON posi-
tion for >1s, then back to the OFF position.
Now, the "ERROR" LED starts blinking: 3xON...
pause...3xON...
2. Calibration
By setting the DIP switch 5 to the ON position for
>1s, then back to the OFF position (see chapter
6.1). The "ERROR" LED goes out.
After calibration, the SSI driver is turned on again
and the valid position value is output.
7.3 Sensor head service line
With the operating voltage switched on (24V), the
service line of the sensor head is continuously mo-
nitored. Since changes of position can no longer
be gathered correctly following cable break, the
•
•
•
•
•
•
16 ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07
+24V/GND
ASA510
"SSI-Mode"
cycle+/cycle-/
data+/data- eg. MA10/3
SSI
power pack:
24VDC/
500mA
Fig. 8: SSI block diagram
Configuration of the SIKO magnetic display MA10/3
SSI: Data format "no", encoder bits "24", singleturn bits
(irrelevant, as long as APU=0), output code "Gray"
Configuration of the SIKO magnetic display MA10/4
SSI: encoder type "linear", encoder bits "24", factor
"1.0" (1/100mm display), output code "Gray"
ASA510 changes to the ERROR state signalized
by a continuously lit "ERROR" LED. Additionally,
the ERROR state is internally stored non-volatile
to ensure signalling even after repeated switching
on of supply voltage.
7.3.1 ERROR state (cable break) of ASA510 in
the RS485 operating mode
In the Register system state, bit 2 and bit 5 or bit
6, respectively, are set depending on the signal
lines affected (see chapter 10.1)
In the service standard protocol setting (see
chapter 5.1): Instead of the valid position value
the fixed value "+99999998>" or "+99999997>",
respectively, is ouput by means of the "W" or
"Z" commands depending on the signal lines
affected.
In the SIKONETZ3 protocol setting (see chapter
5.1): Instead of the valid position value the fixed
value "8388554" or "8388553", respectively, is
ouput by means of the "16h" command depending
on the signal lines affected.
The ERROR state (cable break) may be acknow-
ledged as described in chapter 7.2.1 (ERROR state
magnetic field).
7.3.2 ERROR state (cable break) of ASA510 in
the SSI operation mode
(see chapter 7.2.2)
Attention! Since the error is static or occurs spo-
radically depending on the type of the cable break,
the sensor line / sensor head must be replaced in
the SIKO factory.
7.4 Function monitoring of the SSI option card
in the SSI mode
In the "SSI mode", internal communication bet-
ween the option card and the basic ASA510 card
is permanently monitored. In the case of interrup-
tion, the SSI driver is turned off, bit 4 is set in
the system status register and stored in the non-
volatile memory (see chapter 10.1). Additionally,
the ERROR LED blinks as follows:
2 x ON....pause...2 x ON...
This error status must be acknowledged by setting
the DIP switch 6 to the ON position for >1s follo-
wed by resetting to the OFF position. Calibration
of the measuring system is not required in this
case.
8. SSI interface of the ASA510
Output of the position value in the SSI mode
The integrated SSI interface of the ASA510 en-
ables the synchronous output of the position
•
•
•
value, whose data format includes a 24bit width
(1bit (MSB) sign + 23bit position value), output
right aligned. The output code is Gray or binary
(see chapter 5.2). All subsequent bits (25, 26...)
are output "0" (see document "ssi_hard_signa-
le_asa510.pdf"). the data signals comply with
the RS422 standard. The cycle inputs are opto-
decoupled and comply with RS422 as well. The SSI
monoflop time is typically 20...25µs, resulting in
a minimum cycle rate of 62.5kHz. The maximum
cycle rate is 1Mhz and is basically limited by the
length of the connection cable, also with regard to
data safety. The following standard values apply:
Cable length Max. cycle rate
2m 1MHz
10m 800kHz
100m 250kHz
200m 125kHz
Application example: Position display
Attention! Only either an SSI or an RS485 wiring
is possible!
9. RS485 interface of the ASA510
Output of position value and parameterization
in the RS485 mode
The ASA510 can be customised to meet individual
requirements via the integrated RS485 interface.
For this purpose, some specific parameters can be
programmed, which are stored in the non-volatile-
memory and can be changed at will.
Attention! In the RS485 mode the DIP switches 3
and 4 are not interpreted while the operating vol-
tage is being turned on. The associated functions
are determined exclusively by the configuration
register-0 und configuration register-1 (see chapter
10.2 and 10.3).
9.1 Protocol description of the Service standard
protocol
The Service standard protocol enables parameteri-
zation, output of position values and diagnosis
of the ASA510. The data signals comply with the
ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07 17
+24V/GND
ASA510 RS232
RXD/TXD/GND
level converter
RS485 <-> RS232
"RS485-Mode"
DÜA/DÜB/GND
power pack:
24VDC/
500mA
PC
Fig. 9: Block diagram RS485
RS485 standard. Since the Service standard proto-
col is not bus-compatible, no other devices must
be connected to the RS485 interface.
Before turning on the voltage supply, check the
positions of DIP switches 1 and 2:
Dip-Schalter 1 = OFF (RS485 mode)
Dip-Schalter 2 = OFF (Service standard protocol)
Connect the serial interface of your PC and the
RS485 interface of the translation module by
means of a level transducer (e.g., Spectra compa-
ny, type I-7520).
After turning on the power supply of the ASA510,
you may immediately start programming by either:
starting a suitable terminal program (e.g., "siko-
term.exe") and manually entering your commands
according to the "List of commands - Service
mode" table (see chapter 9.1.1). Consider the
interface parameters specified.
or
starting the "asa_demo.exe" programming tool. It
enables you to enter your paramters via function
keys and it displays synchronously all relevant data
of the translation module. Consider the optional
transfer parameters that serve for starting the
"asa_demo.exe" program.
You may request the "sikoterm.exe" and "asa_
demo.exe" programs as well as supplementary
notes on their operation from SIKO or download
their latest versions from the internet under the
address: http://www.siko.de/download
Application example PC / Terminal
•
•
Output: All response telegrams are comple-
ted with a CR (=hex13), except for
the "W" command.
Comm. Length Response Description
A0 2/10 "xxxxxxxx>" Hardware version
A1 2/7 "xxxxx>" Software version
A2 2/10 "xxxxxxxx>" Hardware version of the option
card
A3 2/7 "xxxxx>" Software version der of the op-
tion card
B 1/11 "+xxxxxxxx>" Position value without correction
values
Ey 2/11 "+xxxxxxxx>" Issue parameter
y = address (0...6)
x = decimal value
y = 0: position value
y = 1: PWM value
y = 2: zero position value
y = 3: calibration value
with option card MWU/MWI:
y = 4: 12Bit PWM minimum value
y = 5: 12Bit PWM maximum value
y = 6: final mechanical value
Fy+xxxxxxx 10/2 ">" Enter parameter
y = address (0...6)
x = decimal value (±0...9999999)
y = 2: zero position value (de-
fault=0)
y = 3: calibration value (de-
fault=0)
with option card MWU/MWI:
y = 4: 12Bit PWM minimum value
(default=0)
y = 5: 12Bit PWM maximum value
(default=4095)
y = 6: final mechanical value
(default=0)
K 1/- Software reset
M 1/4 "XX>" send SIKONETZ3-address (default
= 01)
Nxx 3/2 ">" hand over SIKONETZ3-address 2-di-
git (xx = decimal value 01 ... 31)
Ry_xxxxxxx 11/2 ">" Enter configuration register
y = 0: Register-0
y = 1: Register-1
_ : Separator
xxxxxxx = Bit 7, 6, 5 ... 0: Regis-
ter content
S00000 6/2 ">" Set position value to calibration
value
S11100 6/2 ">" set device to original state (de-
fault setting):
Software filter: ON
ADC channel: High Resolution
Counting direction: POSITIVE SSI
code: Gray
RS485 Start message: NO
delete ERROR Status
delete calibration data
T0 2/2 ">" counting direction POSITIVE
(default)
T1 2/2 ">" counting direction NEGATIVE
W 1/4 "xxxx" Absolute position value in bina-
ry code
X 1/6 "0xyy>" Output system status register
hexadecimal
"0x Bit7..4 Bit3..0"
9.1.1 List of commands-Service standard pro-
tocol
The basic principle of the application is that the
PC (or a terminal) sends an ASCII command (cha-
racter), possibly with additional numeric parame-
ters. In turn, the ASA510 sends an appropriate
response (see following table):
Parameter: 19200 baud, no parity, 8 bit, 1Stop
bit, no hand shake
Output: ASCII (if not otherwise specified)
Value ranges: 2/3 byte: 0...65535 / 0... ±223.
Input: Capitals and small letters are ac-
cepted.
18 ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07
Comm. Length Response Description
Y0 2/6 "0xyy>" Output configuration register-0
hexadecimal
"0x Bit7..4 Bit3..0"
Y1 2/6 "0xyy>" Output configuration register-1
hexadecimal
"0x Bit7..4 Bit3..0"
Z 1/11 "±xxxxxxxx>" Absolute position value
9.2 SIKONETZ3 Protocol description
The SIKONETZ3 protocol enables parameterization
of and output of position values by the ASA510.
The data signals comply with the RS485 standard.
Up to 31 devices may be addressed via bus sin-
ce an address is included in each telegram. The
address of each device is factory set to the value
"01". Therefore, first re-program all parameters
(counting direction, calibration value...), parti-
cularly the device address (01...31) via Service
standard protocol (see chapter 9.1) before opera-
ting the device on a bus. Following this basic pa-
rameterization, switching over to the SIKONETZ3
protocol and, thus, bus operation is possible (DIP
switch 2).
The protocol setup follows the Master-Slave-Sys-
tem; the translation module only has the slave
function. There are 2 telegram length:
3 Byte:
Address
Byte
Command Check
Byte
6 Byte:
Address
Byte
Command Data
Byte
Low
Data
Byte
Middle
Data
Byte
High
Check
Byte
The adress byte is composed als follows:
1 0 A0 A1 A2 A3 A4 0 RR L 1
Start Stop
The test byte results from an EXOR-interconnection
of the remaining two or five bytes of the telegram.
A0 ... A4: binary coded address 1...31; address 0
defined for master
RR: broadcast Bit = 1; command valid for
all devices; devices do not reply
L: length bit: 1 = short telegram (3
bytes); 0 = long telegram (6 bytes)
9.2.1 List of commands SIKONETZ3 protocol
Parameter: 19200 baud, no Parity, 8 bit, 1 Start
bit, 1 Stop bit
Column. Signification
Hex: hexadecimal value of the command
TX: length of telegram from master to device
RX: ength of telegram from device to master
S: transmitted parameter is permanently
stored in the sensor
P: for this command programming mode
has to be activated (command 0x32;
0x33)
R: this command can be broadcasted
Hex TX RX S P R Function
16 Hex 3 6 - - - read out position value
18 Hex 3 6 - - - read out calibration value
1b Hex 3 6 - - - read out device's characteristics
D-Byte 1: identifier = 24;
D-Byte 2: software version;
D-Byte 3: hardware version
1d Hex 3 6 - - - read out counting direction
value = 0: "up" (+);
value = 1: "down" (-)
28 Hex 6 6 S P - program calibration value
value to which the position value
is set when the device is calibrated
(command 0x48)
2d Hex 6 6 S P - program counting direction
value = 0: "up" (+);
value = 1 "down" (-)
32 hex 3 3 - - - programming mode ON
for parameter programming (0x28
and 0x2d), programming mode
must be "ON"
33 Hex 3 3 - - - programming mode OFF
default
3a Hex 3 6 - - - send system status
3b Hex 3 3 - - - cancel system status
System status bytes 2 and 3 are
being deleted
48 Hex 3 3 S P - position value is set to calibration
value
4f Hex 3 3 - - R freeze position value
position value is freezed; deactiva-
ted when positional value is read
out. Used for synchronizing the
readout of several devices.
Error messages
The slave (device) recognizes transmission or
input errors and then issues the following error
messages:
Hex TX RX S P R Function
82 Hex - 3 - - - check sum data transmission error
84 Hex - 3 - - - invalid or unknown command
88 Hex - 3 - - - invalid value (parameter program-
ming
Synchronisation:
Byte/ telegram synchronisation is made via "time-
out": the distance between each byte of a tele-
gram mus not exceed 10ms. If a device does not

ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07 19
Fig. 10: Schematic circuit diagram of the actuator
output
PIN 4 (Actuator UIN
max. 30VDC)
PIN 9 (Actuator OUT
30V/0.5A)
PIN 6 (Actuator 0V)
respond, the master may only send another tele-
gram after 30ms at the earliest.
Telegram example
Master requests position value from device 7.
Master sends (hex): 87 16 91
short telegramm to address 7 (87h); read out po-
sition value (16h); check byte (91h)
ASA510 replies (hex): 07 16 03 02 00 10
long telegram form address 7 (07h); read out po-
sition value (16h); value 203h = 515 dez (03 02
00h); check byte (10h).
10. Overview of bit assignment of the
individual registers
10.1 8bit System status register
Bit Default Remarks
Bit 0 0 ERROR-Bit:
-is set als soon as sensor/ strip gap > ~
3mm (see chapter 7.2)
Bit 1 0 LoBatt-Bit
-is set as soon as Li battery < 2,8V
-self-resetting after battery replace-
ment
Bit 2 0 -is set as soon as travel speed in the
direction to be monitored > ~ 25m/min
-self-resetting as soon as travel speed
< ~ 25m/min
Bit 3 0 (for internal purposes: Software counter
offset)
Bit 4 0 -is set if an internal error of communica-
tion with the option card was detected
(see chapter 7.4)
Bit 5 0 -is set if disconnection of the sensor
line (fine value) was detected (see
chapter 7.3).
Bit 6 0 -is set if disconnection of the sensor
line (coarse value) was detected (see
chapter 7.3).
The error bits 0, 4, 5, 6 remain set until after pro-
per acknowledgement.
10.2 8bit configuration register-0
Bit Default Remarks
Bit 0 0 If set, an identifier is sent via RS485 (if
active) after turning on +24V => start
message "HI"
Bit 1 0 ounting direction:
0 = POSITIVE; 1 = NEGATIVE
Bit 2 1 SSI code:
0 = binary; 1 = Gray
Bit 3 1 (for internal purposes: Software counter)
Bit Default Remarks
Bit 4 0 (for internal purposes: ADC channel se-
lect)
Bit 5 1 Software filter:
0 = OFF; 1 = ON
Bit 6 0 not used
Bit 7 0 not used
10.3 8bit configuration register-1
Bit Default Remarks
Bit 0 ... 4 0 not used
Bit 5 1 Speed monitoring: 0= OFF; 1 = ON
Bit 6 0 Direction of speed monitoring:
0 = POSITIVE; 1 = NEGATIVE
Bit 7 0 Speed monitoring of all directions:
0 = OFF; 1 = ON
11. Actuator output of the ASA510
The switching output of the ASA510 is optodecou-
pled with regard to its 24V supply. Therefore, an
external voltage (max. 30VDC) must be applied to
PIN 4 of D-SUB (Actuator UIN) as well as the rele-
vant GND to PIN 6. To PIN 9 (Actuator OUT) the
potential actuator UIN is gated. The max. power
rating is ~ 0,5A.
Speed-dependent actuator output
If bit 5 of the configuration register-1 is set, then
the travel speed of the sensor head is monitored.
If the travel speed is > 25m/min or if the ERROR
status occurs (see chapter 7.2 and 7.3), then the
"Actuator OUT" output of the sensor is switched
into a high-impedance condition and bit 2 is set
in the System status register. Upon speed reduc-
tion to < 25m/min, bit 2 is deleted independently
and the actuator output "Actuator OUT" closed
towards "Actuator UIN".
12. Trouble shooting
Below there are some typical errors which may oc-
cur during installation and operation:
The ASA510 is not or incorrectly connected (pin
connection see chapter 4).
•
20 ASA510+MB500 Datum 15.10.2007 Art.Nr. 82079 Änd. Stand 260/07
SIKO GmbH
Werk / Factory:
Weihermattenweg 2
79256 Buchenbach-Unteribental
Postanschrift / Postal address:
Postfach 1106
79195 Kirchzarten
Telefon/Phone +49 7661 394-0
Telefax/Fax +49 7661 394-388
E-Mail info@siko.de
Internet www.siko.de
Service [email protected]e
Tolerance for the gap between magnetic sensor and
magnetic strip not observed over the total travel
distance. Sensor touches strip (see chapter 7).
Cable squeezed / interrupted / cut by sharp
edges.
Sensor's active side not mounted towards the
magnetic strip (see fig. 7).
Sensor and strip are aligned incorrectly towards
each other (see chapter 3.2). Magnetic fields next
to the measurement area falsify the measured
values; screening may be required.
Wrong measuring values due to EMC interferences
(see chapter 4).
The operating mode set does not correspond with
the hardware connected.
•
•
•
•
•
•
This manual suits for next models
1
Table of contents
Languages:
Other Siko Control Unit manuals

Siko
Siko AS/2+MB Operation manual

Siko
Siko AS510/1 User manual

Siko
Siko AS510/1 User manual

Siko
Siko AS510 Operation manual

Siko
Siko AS510/1 Operation manual

Siko
Siko MA523/1-S User manual

Siko
Siko Easy Touch Control ETC5000 User manual

Siko
Siko AEA111/1 Operation manual

Siko
Siko MS02 User manual

Siko
Siko MS02 User manual
Popular Control Unit manuals by other brands













Image Engineering
Image Engineering iQ-LED V2 Setup instructions

Crow
Crow 4 OUTPUTS RELAY EXPANDER BOARD OUTPUT MODULE... Installation instruction

Elvaco
Elvaco CMi Series user manual

Anritsu
Anritsu MT1000A Network Master Pro Operation manual

ZAFFER
ZAFFER ONE user manual

Pilz
Pilz PZE 9P operating instructions