Contents
1 Introduction.............................................................................................................................1
1.1 Description.......................................................................................................................1
1.2 Features...........................................................................................................................1
1.3 Dimensions......................................................................................................................1
1.4 Specifications...................................................................................................................1
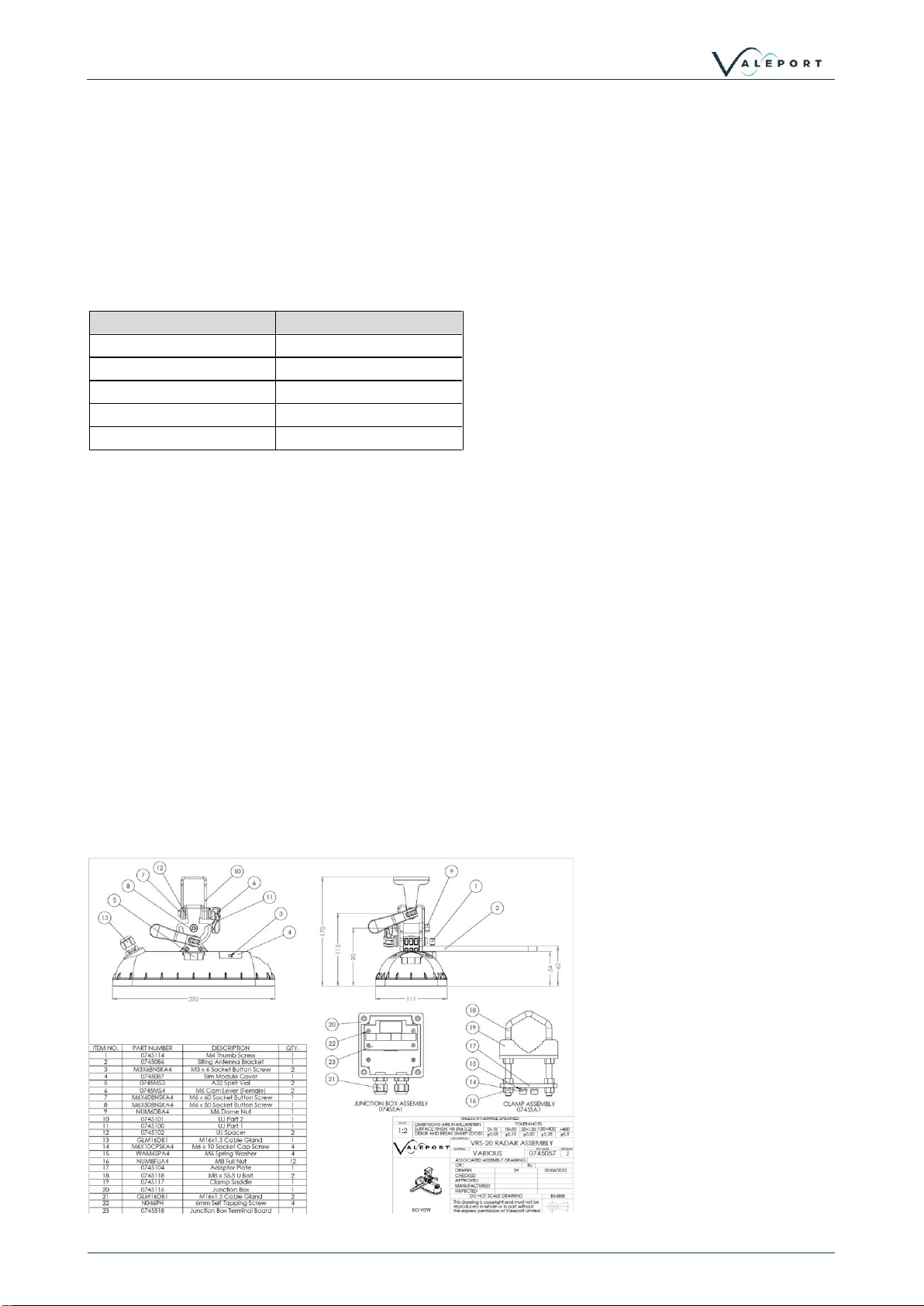
2 Installation..............................................................................................................................2
2.1 Tool Requirements...........................................................................................................2
2.2 Mounting on a Boom........................................................................................................4
2.3 Direct Mounting................................................................................................................5
2.4 Levelling...........................................................................................................................5
2.5 Wiring...............................................................................................................................6
2.5.1 Junction box ............................................................................................................6
3 Communications.....................................................................................................................7
3.1 RS232 Communications...................................................................................................7
3.2 RS485 Communications...................................................................................................7
3.2.1 RS485 Address Mode..............................................................................................7
3.3 SDI12 Communications....................................................................................................8
4 Data .....................................................................................................................................10
4.1 Stand Alone Data Format...............................................................................................10
4.2 Data Status....................................................................................................................10
5 Sampling modes...................................................................................................................11
5.1 Sampling Principles........................................................................................................11
5.2 Operation with a TideMaster..........................................................................................11
5.3 Stand Alone Operation...................................................................................................12
5.3.1 Measurement Interval and Duration.......................................................................12
5.3.2 Operational Sequence...........................................................................................13
5.3.3 Single Mode...........................................................................................................14
5.3.4 Continuous Mode...................................................................................................15
5.3.5 Filtering and Smoothing.........................................................................................15
6 # codes.................................................................................................................................18
6.1 Stop Command..............................................................................................................18
6.2 General Commands.......................................................................................................18
6.3 Setup Commands ..........................................................................................................18
6.4 Sampling Commands.....................................................................................................19
7 Wiring Information ................................................................................................................20
7.1 Tidemaster.....................................................................................................................20
7.2 Stand Alone ...................................................................................................................21
8 Declarations of Conformity ...................................................................................................22
8.1 Approvals.......................................................................................................................22
8.2 EU Declaration of Conformity.........................................................................................23