iv IM 701240-17E
Contents
How to Use this Manual ................................................................................................................. iii
Chapter 1 Overview of the GP-IB Interface
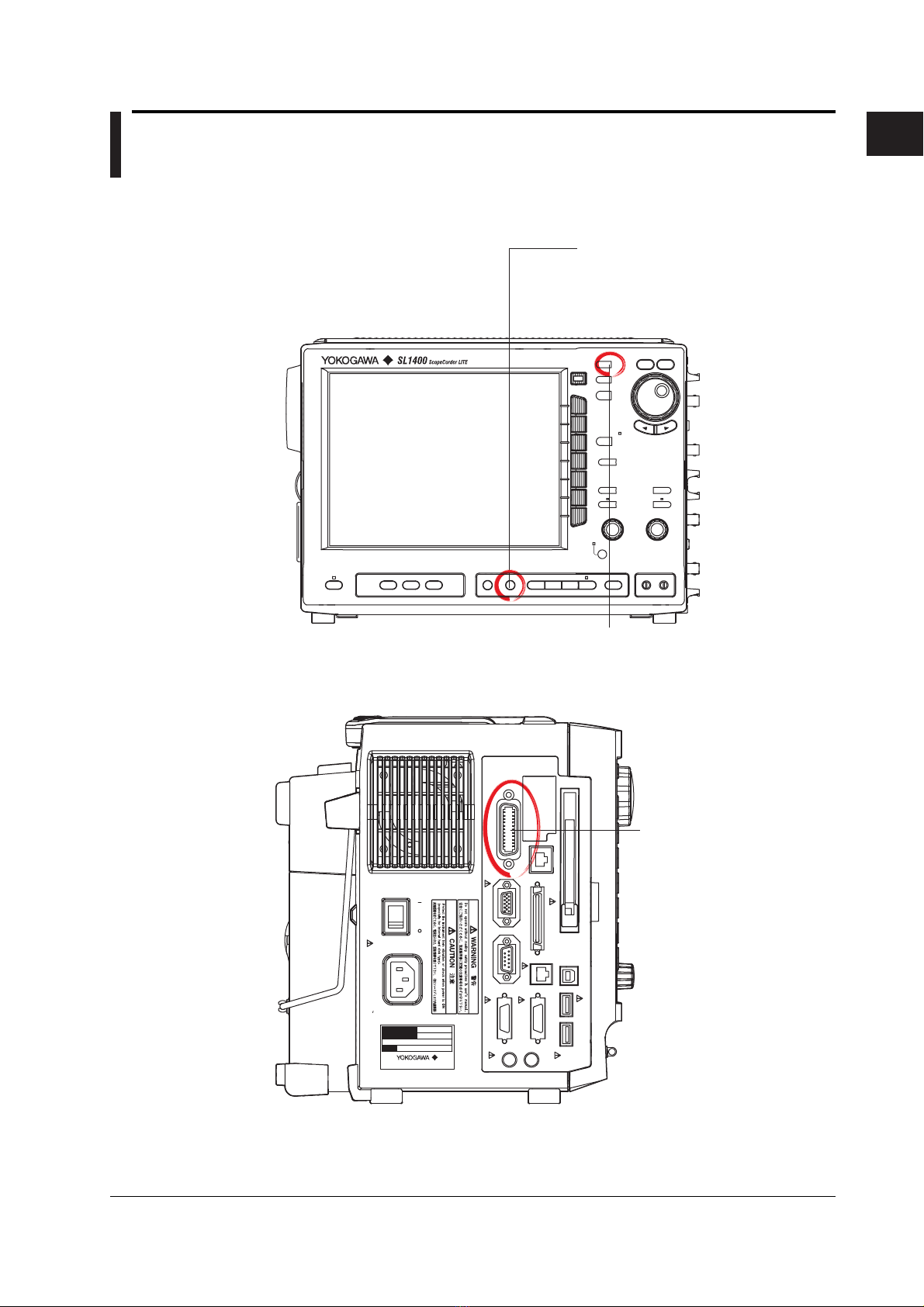
1.1 Names of the Parts and their Function .......................................................................... 1-1
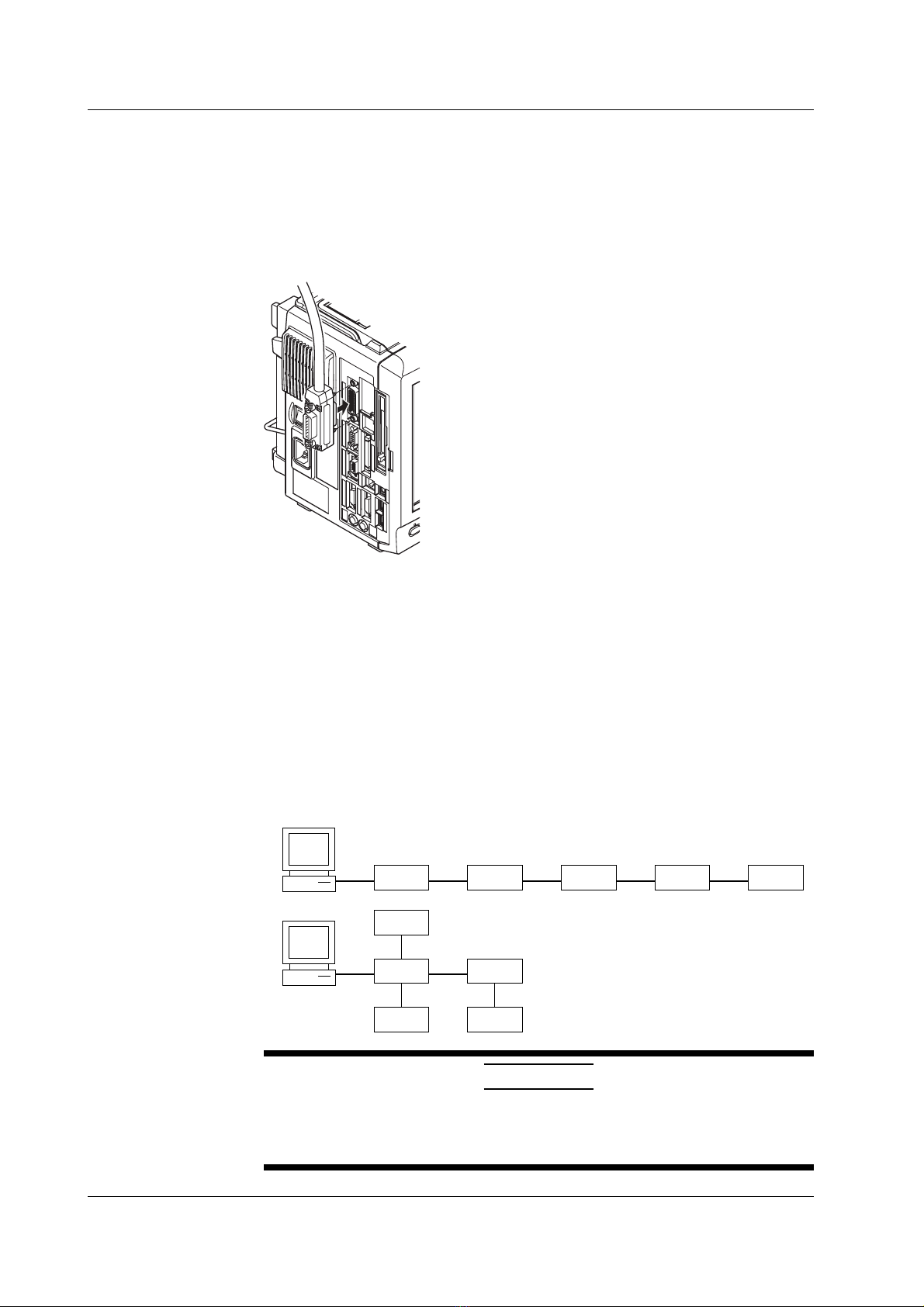
1.2 Connection via the GP-IB Interface ............................................................................... 1-2
1.3 GP-IB Interface Functions ............................................................................................. 1-3
1.4 GP-IB Interface Specifications ....................................................................................... 1-4
1.5 Setting up this Instrument (GP-IB) ................................................................................. 1-5
1.6 Response to Interface Messages .................................................................................. 1-6
Chapter 2 Overview of the Serial (RS-232) Interface
2.1 Names of the Parts and their Function .......................................................................... 2-1
2.2 Serial (RS-232) Interface Functions and Specifications ................................................ 2-2
2.3 Connection via the Serial (RS-232) Interface ................................................................ 2-3
2.4 Handshaking .................................................................................................................. 2-5
2.5 Matching the Data Format ............................................................................................. 2-7
2.6 Setting up this Instrument (Serial) ................................................................................. 2-8
Chapter 3 USB Interface
3.1 Names of the Parts and their Function .......................................................................... 3-1
3.2 USB Interface Functions and Specifications.................................................................. 3-2
3.3 Connection via the USB Interface .................................................................................. 3-3
3.4 Setting up this Instrument (USB) ................................................................................... 3-4
Chapter 4 Network Interface (Option)
4.1 Names of the Parts and their Function .......................................................................... 4-1
4.2 Network Interface Functions and Specifications ............................................................ 4-2
4.3 Connection via the Network Interface ............................................................................ 4-4
4.4 Setting up this Instrument (Network) ............................................................................. 4-5
Chapter 5 Before Programming
5.1 Messages ...................................................................................................................... 5-1
5.2 Commands .................................................................................................................... 5-3
5.3 Response....................................................................................................................... 5-4
5.4 Data ............................................................................................................................... 5-5
5.5 Synchronization with the Controller ............................................................................... 5-7
Chapter 6 Commands
6.1 A List of Commands ...................................................................................................... 6-1
6.2 ACQuire Group ............................................................................................................ 6-18
6.3 ASETup Group ............................................................................................................. 6-20
6.4 CALibrate Group .......................................................................................................... 6-21
6.5 CHANnel Group ........................................................................................................... 6-22
6.6 CLEar Group................................................................................................................ 6-44
6.7 COMMunicate Group ................................................................................................... 6-45
6.8 CURSor Group ............................................................................................................ 6-47
6.9 DISPlay Group ............................................................................................................. 6-56
6.10 FILE Group ..................................................................................................................6-61
6.11 HCOPy Group.............................................................................................................. 6-67
6.12 HISTory Group ............................................................................................................. 6-77