www.balluff.com 9
3Aufbau und Funktion (Fortsetzung)
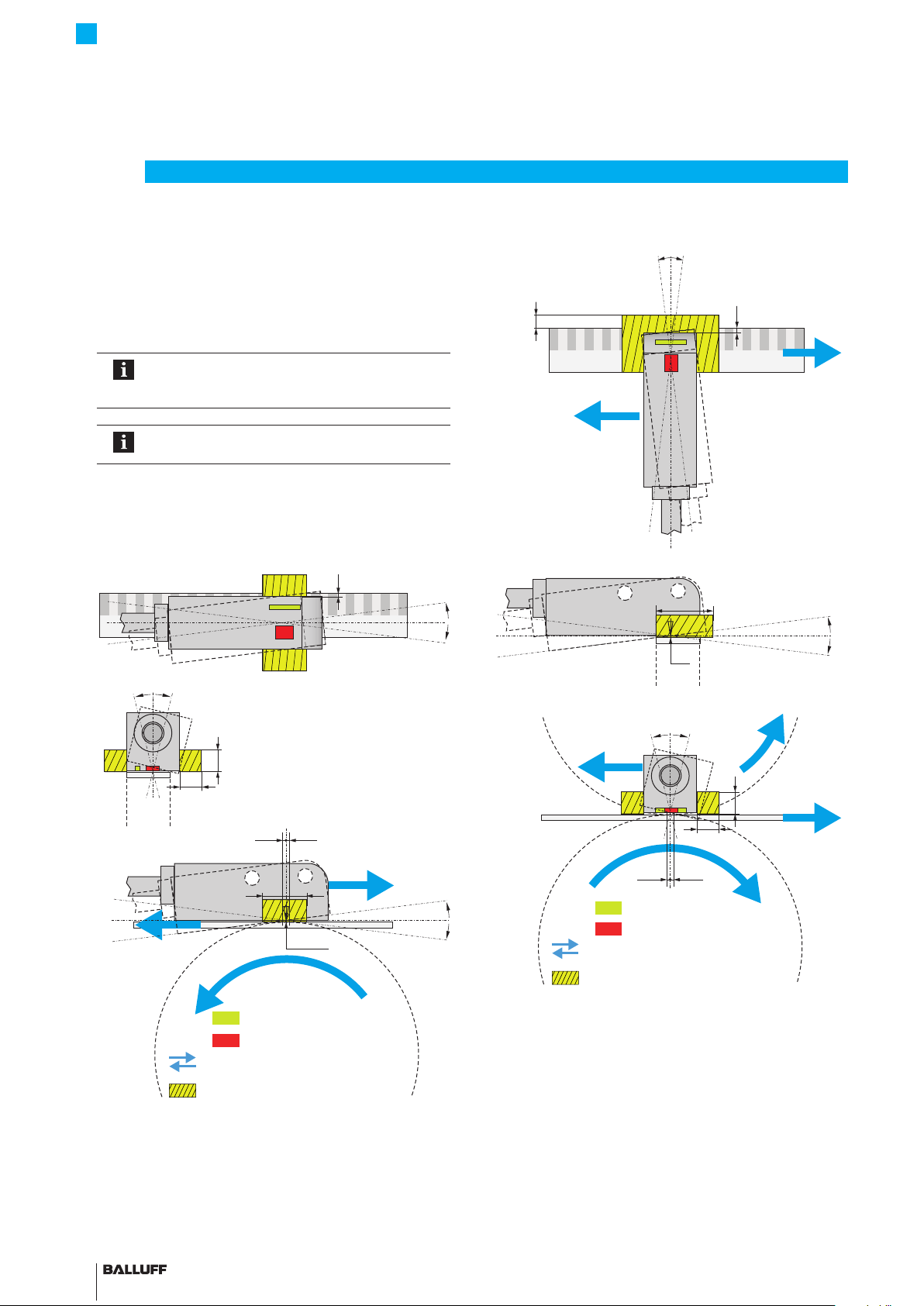
3.3 Referenzpunktfunktion
Für jedes inkrementelle Wegmesssystem ist die Referenz-
position als Startpunkt für die Zählung unabdingbar.
Wie die Referenzposition ermittelt wird, hängt vom Sensor-
kopf, vom Maßkörper und von der Steuerung ab.
Vorteile der polperiodischen und fixperiodischen Maßkör-
per: Der Maßkörper kann in großen Längen gekauft und
selbst zugeschnitten werden.
Die Referenzpunktfunktionen sind sowohl bei linearen als
auch bei runden Maßkörpern möglich.
Kein oder polperiodisches Referenzsignal:
System bestehend aus:
– BML-S1F…-M_00-… (kein) oder
BML-S1F…-Q61…-M320-… (polperiodisch)
– Maßkörper BML-M…-I_ _-…-R0000
BML-S1F1...M_00/BML-S1F1...M320
BML-S1F2...M_00/BML-S1F2...M320
BML-M...-I_ _-...-R0000
Beim einfachsten Wegmesssystem tastet der Sensorkopf
mit den Inkrementalsensoren die magnetischen Perioden
ab. Auf dem Maßkörper befindet sich eine Spur mit mag-
netischen Nord- und Südpolen. Die Position wird von der
Steuerung durch Summieren der gezählten Inkremente
ermittelt.
Beim polperiodischen Referenzsignal wird mit jedem
magnetischen Pol, also alle 1mm, ein Referenzsignal
ausgegeben. In diesem Fall muss ein externer Referenz-
schalter an das gewählte Referenzpunktsignal gesetzt
werden. Die Steuerung wertet die Referenzposition genau
dann aus, wenn der Schalter und das Referenzsignal vom
Sensorkopf aktiv sind.
Einzelnes oder zweifaches Referenzsignal:
System bestehend aus:
– BML-S1F…-M310-…
– Maßkörper BML-M…-I3 _-…-R____/0000 (einzelnes
Signal) oder BML-M…-I3 _-…-R____/____ (zwei-
faches Signal)
BML-S1F1...M310
BML-S1F2...M310
BML-M...-I3 _-...-R_ _ _ _/0000
Ein Sensorkopf mit einem zusätzlichen Referenzpunktsen-
sor kann ein Referenzsignal ausgeben, sobald er den
magnetisch kodierten Referenzpunkt auf der zweiten Spur
des Maßkörpers erreicht. Ein externer Referenzschalter ist
nicht erforderlich.
Fixperiodische Referenzsignale:
System bestehend aus:
– BML-S1F…-M310-…
– Maßkörper BML-M…-I3 _-…-C0006/____
BML-S1F1...M310
BML-S1F2...M310
BML-M...-I3 _-C0006/_ _ _ _
Der Sensorkopf mit einem zusätzlichen Referenzpunktsen-
sor kann auch mit einem Magnetband-Maßkörper mit
fixperiodischen Referenzpunkten kombiniert werden. Hier
sind die Referenzpunkte in bestimmten gleichbleibenden
Abständen, z.B. alle 10cm, über die gesamte Länge im
Maßkörper integriert.
Um die exakte Position zu ermitteln, muss die Referenz-
fahrt bis zum externen Auswahlschalter verlaufen.
BML-S1F_-A/Q___-M__0-_0-…
Inkrementelles magnetkodiertes Wegmesssystem
deutsch