2 May 2015 K0582 Revision B
2Installation
General2.1
Before installing the DPS 5000 series sensor:
xEnsure that the sensor is the correct type for the application and will not be
subject to pressures or media outside those specified on the applicable
datasheet or specification drawing.
xIf the sensor is being installed in a hazardous area observe the installation
instructions given in the supplied document K0546 or K0547.
xRead all relevant instructions and procedures in the applicable system
installation manual.
To prevent contamination prior to installation, keep the sensor in the original
packaging with all the supplied covers fitted.
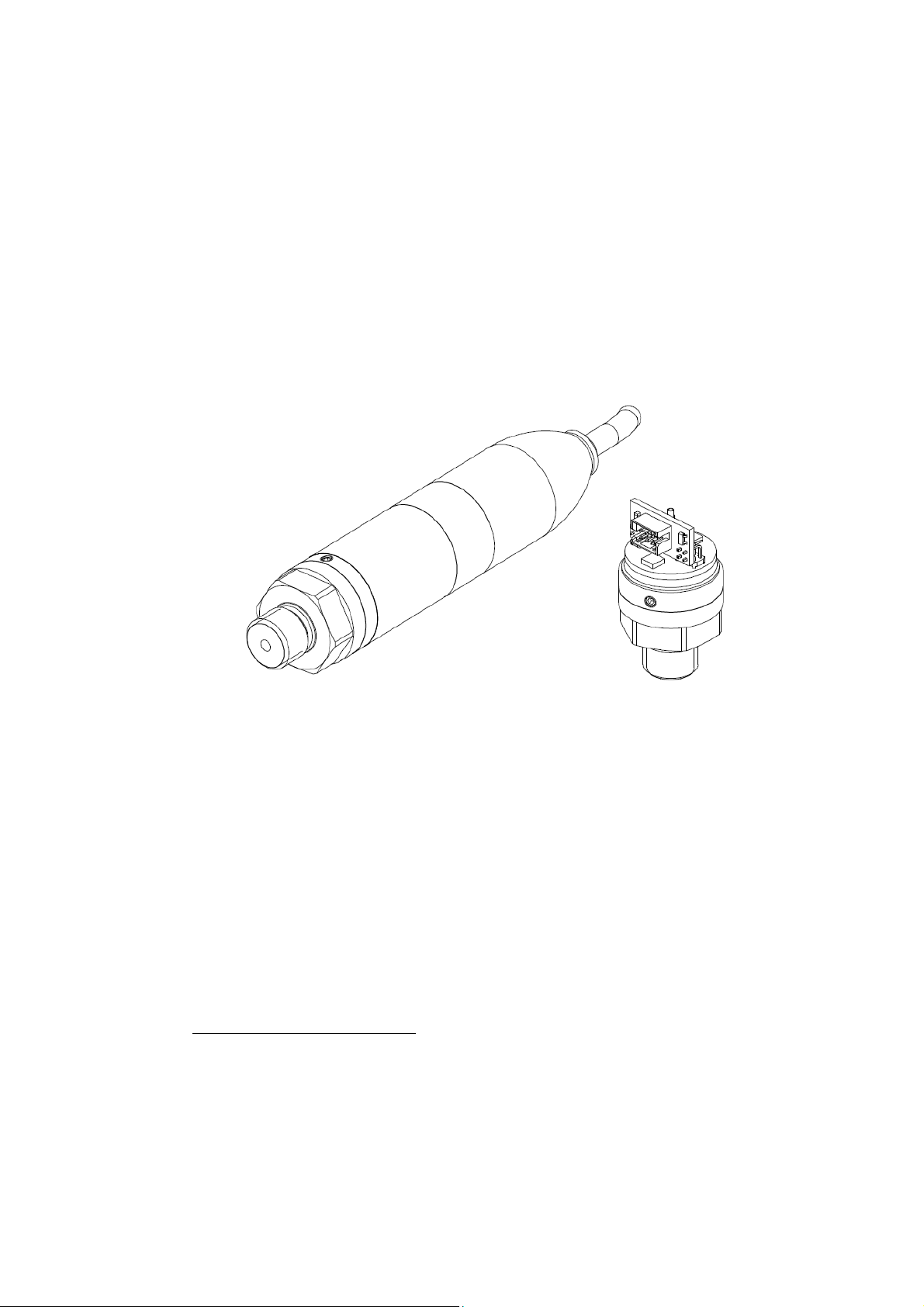
When installing the internal variant, to prevent possible damage, avoid touching or
applying excessive force to the exposed PCB assemblies.
WARNING
Do not interchange sensors between an oil system and a system that uses fuel or
gas. This can cause an explosion resulting in death or injury and/or damage to
equipment.
High pressures and extremes of temperature are dangerous. De-pressurize and
allow components to attain an acceptable temperature in systems where high
pressures and high or low temperatures are present.
CAUTION
The sensor contains ESD sensitive devices. Whilst the sensor incorporates
protection against ESD, caution should be taken to observe proper ESD handling
procedures when installing the internal variant.
Mounting and orientation2.2
The DPS 5000 series sensors are designed to be mounted in any orientation.
However, the sensor is a harsh media isolated product and the isolation is achieved
by hermetically sealing the sensor chip within an oil filled chamber. The weight of
the oil gives a g-sensitivity as a pressure offset error that may be noticeable at the
lowest pressure ranges.
Ensure the sensor is mounted in a manner that avoids unwanted mechanical or
thermal stress such as vibration, shock or excessive or rapid temperatures
excursions.
Connecting to the pressure source2.3
When connecting the pressure source to the sensor, ensure the mating surfaces are
correctly sealed. Failure to properly seal may affect the sensor performance or
calibration accuracy.
Male parallel threaded pressure connectors must not be sealed or constrained
against the face at the base of the thread. The forward flat face should be used as
shown in Figure 2.