Content
CANblue II - Manual, Version 2.2
5.2 CanBlueCon Configuration Tool ......................................... 24
5.2.1 Command Line Parameters...................................................24
5.2.2 Additional Commands............................................................24
5.2.3 Interactive Mode ....................................................................25
5.2.4 Batch Mode............................................................................26
5.2.4.1 Rx-Tx Demo.............................................................26
5.2.4.2 Bridge Mode Setup Demo........................................27
5.3 Connecting with Hyperterminal........................................... 29
5.4 Configuration examples....................................................... 29
5.4.1 Connecting CAN to the PC through the CANblue II ..............29
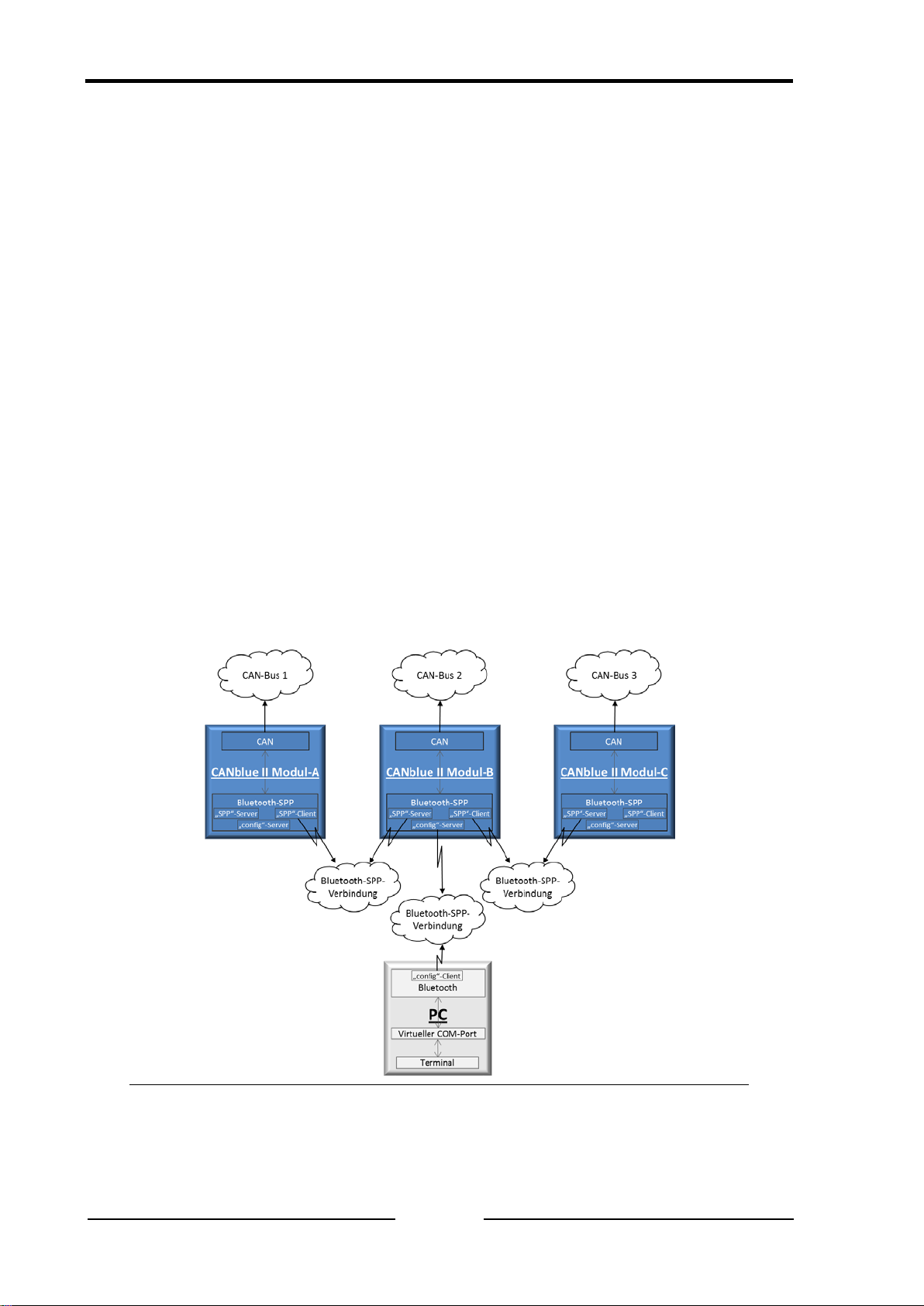
5.4.2 Configuring a CAN bridge with two CANblue II devices........31
5.4.3 Connecting another CANblue II.............................................34
6Extended ASCII-Protocol Commands........................................ 35
6.1 Device specific Commands................................................. 35
6.1.1 D VERSION ...........................................................................35
6.1.2 D PROTOCOL .......................................................................35
6.1.3 D IDENTIFY...........................................................................36
6.1.4 D INFO...................................................................................36
6.1.5 D CONFIG..............................................................................37
6.1.6 D MAC_ADD..........................................................................39
6.1.7 D MAC_REMOVE..................................................................39
6.1.8 D MAC_CLEAR .....................................................................40
6.1.9 D MAC_SCAN........................................................................40
6.1.10 D MAC_MASTER_ADD .......................................................41
6.1.11 D MAC_MASTER_REMOVE ...............................................42
6.1.12 D MAC_MASTER_CLEAR...................................................42
6.1.13 D PASSKEY_SET................................................................43
6.1.14 D VISIBILITY TIMEOUT.......................................................43
6.1.15 D BUFF_TIMEOUT ..............................................................44
6.1.16 D LINK_POLICY...................................................................44
6.1.17 D RESET..............................................................................45
6.1.18 D SETTINGS_DEFAULT .....................................................46
6.1.19 D DISCONNECT_SET.........................................................46
6.1.20 D DISCONNECT_RESET....................................................47