2 | S e i t e
Inhaltsverzeichnis
1. Einleitung.................................................................................................................................................................3
1.1 Übersicht................................................................................................................................................................3
1.2 Antriebs-Sicherheit und typische Fehlerarten .........................................................................................................3
1.3 Begriffe...................................................................................................................................................................3
2. Anschluss.................................................................................................................................................................4
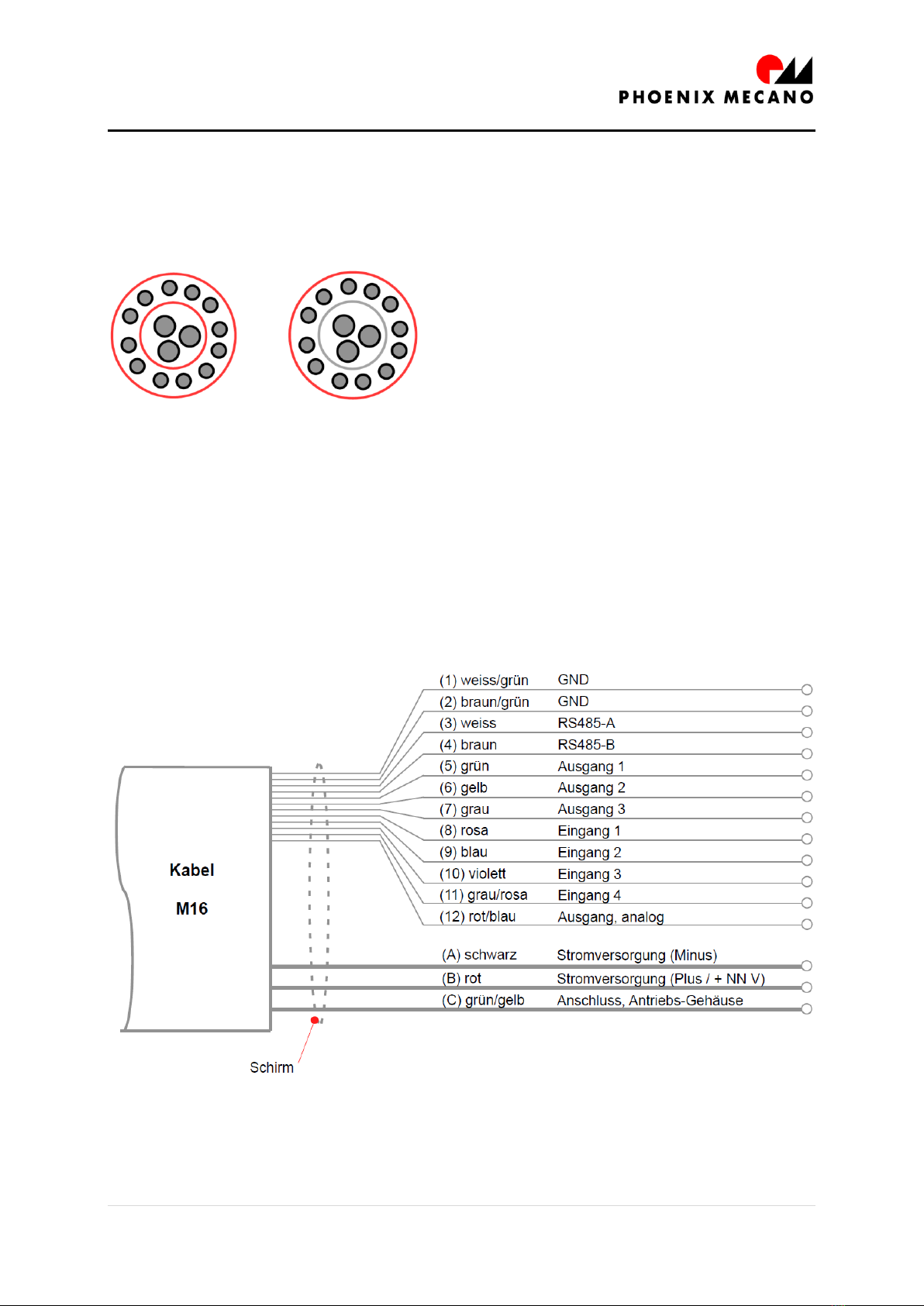
2.1 Kabel M16..............................................................................................................................................................4
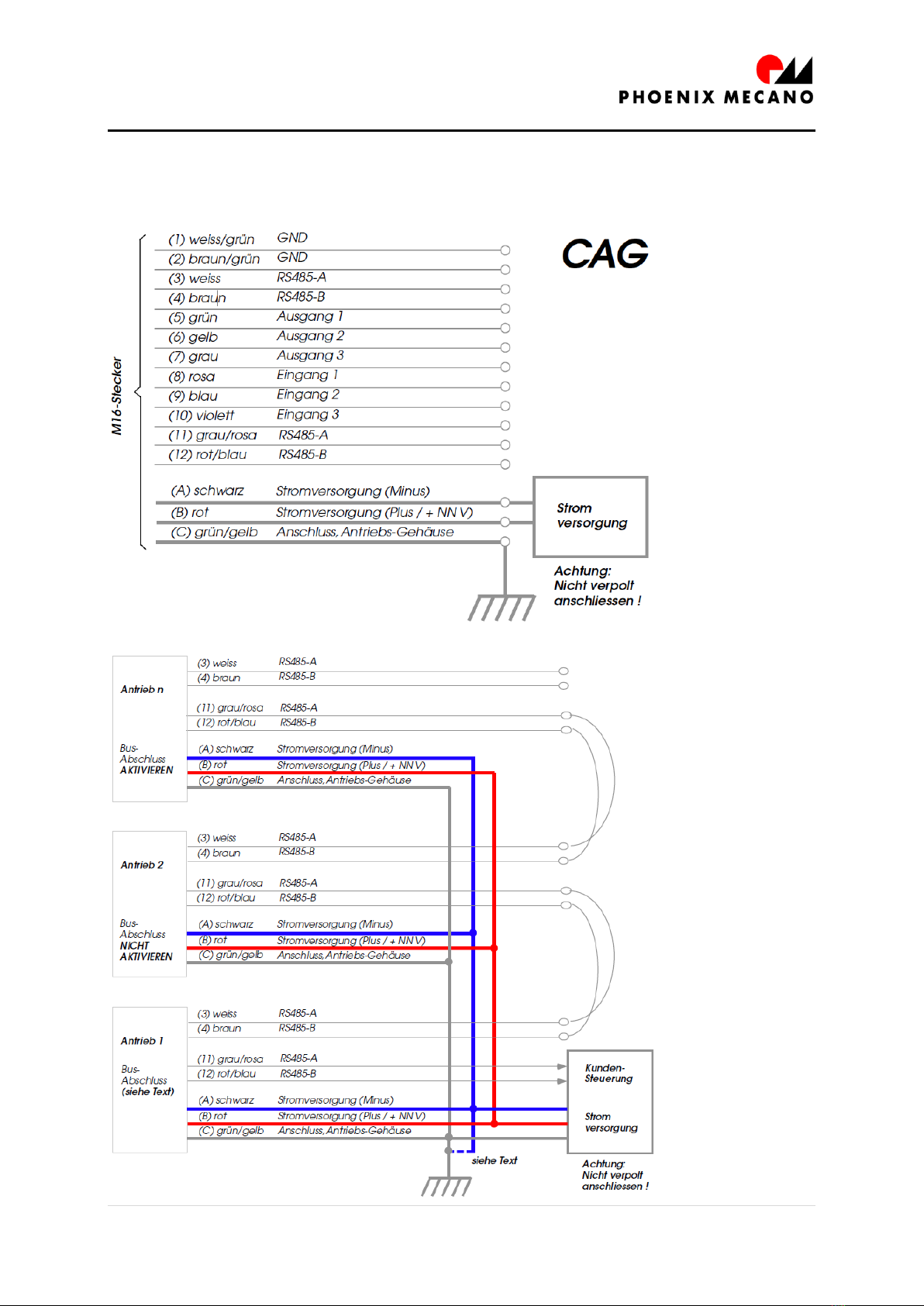
2.2 Steckverbinder M16: Signal-Belegung und –Beschreibung.....................................................................................4
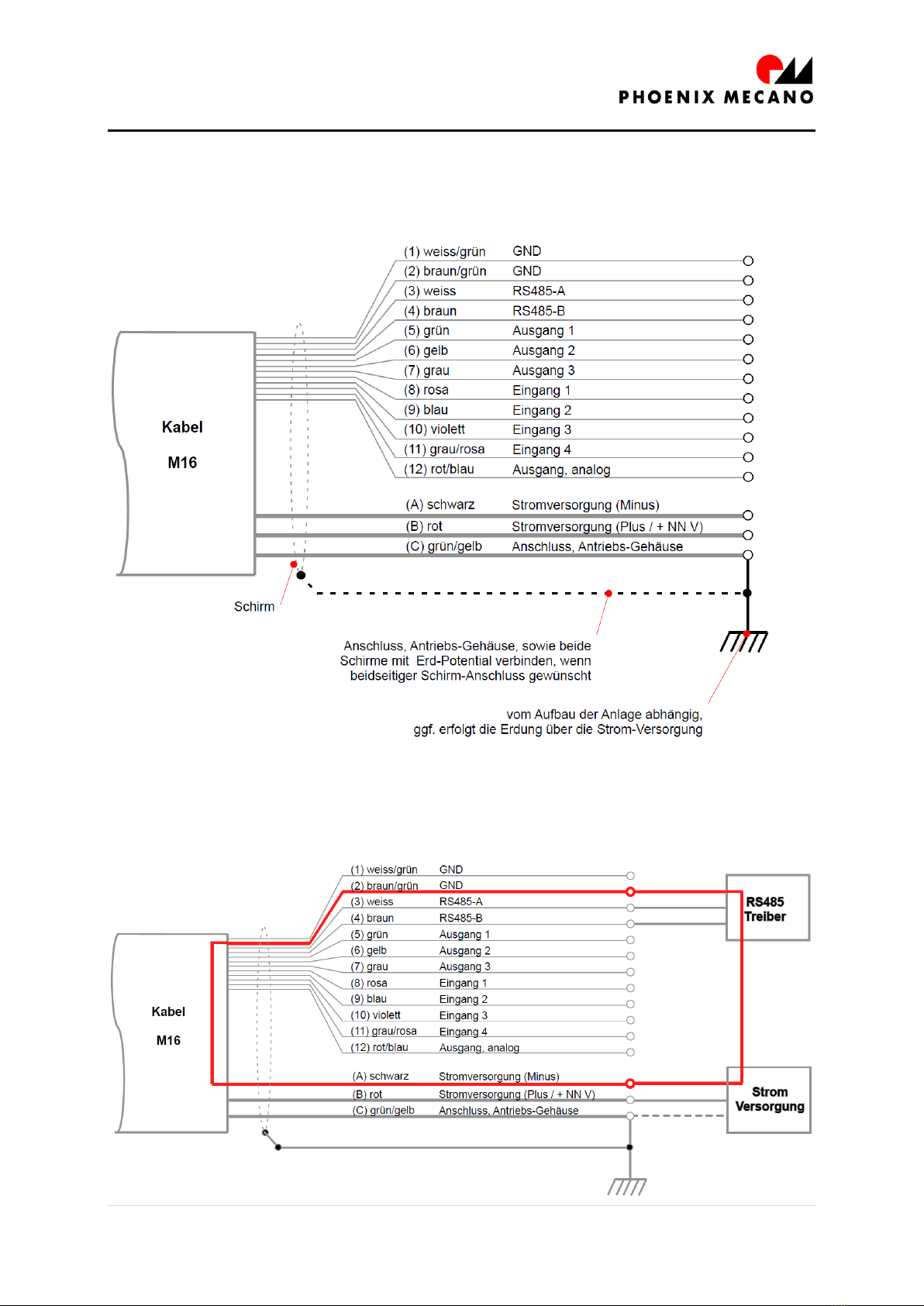
2.3 Schirmung..............................................................................................................................................................6
2.4 Bezugs-Potential-Anschluss...................................................................................................................................6
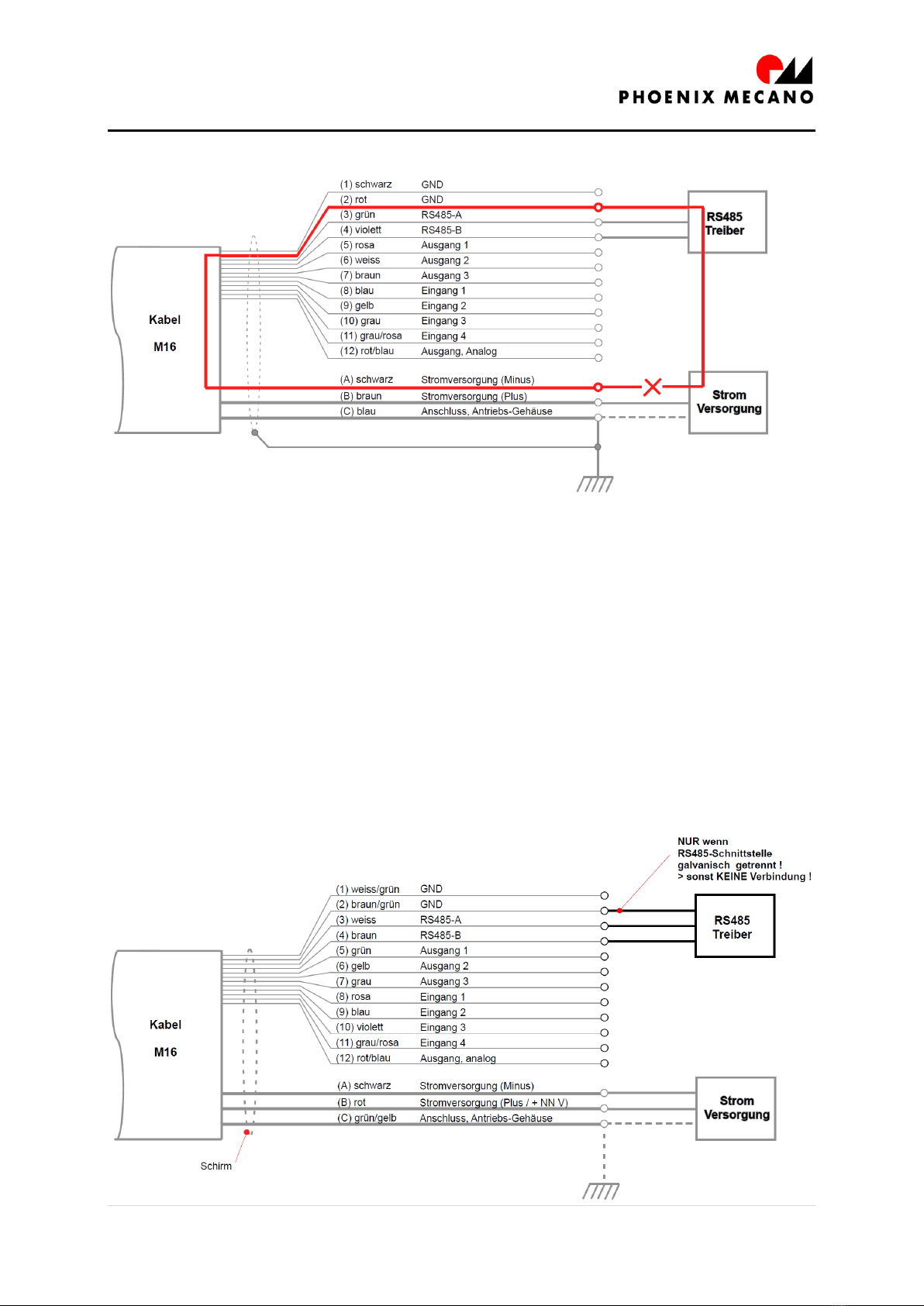
2.5 RS485-Schnittstelle................................................................................................................................................7
2.5.1 Anschluss bei isolierter RS485-Schnittstelle auf Steuerungs-Seite......................................................................7
2.5.2 Anschluss bei NICHT-isolierter RS485-Schnittstelle auf Steuerungs-Seite..........................................................8
2.5.3 Anschluss via M12-Stecker .................................................................................................................................8
2.5.4 Zusammenschalten mehrerer Antriebe via M16-Kabel ........................................................................................9
2.6 Digitale Ausgänge................................................................................................................................................10
2.7 Digitale Eingänge.................................................................................................................................................11
2.7.1 Allgemeines.......................................................................................................................................................11
2.7.2 Anwendung SPS...............................................................................................................................................11
2.7.3 Anwendung Handschalter..................................................................................................................................12
2.7.4 Steuerbare Funktionen......................................................................................................................................12
3. Synchron-Betrieb ...................................................................................................................................................13
3.1 Übersicht..............................................................................................................................................................13
3.2 Normal-Betrieb.....................................................................................................................................................14
3.3 Fehler-Arten und Beseitigung...............................................................................................................................15
3.4 Ausgleichs-Modus................................................................................................................................................16
3.5 Not-Betrieb...........................................................................................................................................................16
4. Modbus-Interface...................................................................................................................................................17
4.1 Allgemeines..........................................................................................................................................................17
4.2 Unterstütze Requests...........................................................................................................................................17
4.2.1 Allgemeines.......................................................................................................................................................17
4.2.2 0x03 Read Holding Registers............................................................................................................................17
4.2.3 0x06 Write Single Holding Register...................................................................................................................17
4.2.4 0x10 Write Multiple Register..............................................................................................................................18
4.3 Register-Definition................................................................................................................................................18
4.3.1 Übersicht...........................................................................................................................................................18
4.3.2 Abfrage System-Status......................................................................................................................................18
4.3.3 Abfrage Firmware-Version.................................................................................................................................19
4.3.4 Abfrage Hardware-Version................................................................................................................................19
4.3.5 Abfrage Serien-Nummer....................................................................................................................................19
4.3.6 Bewegung starten .............................................................................................................................................19
4.3.7 Bewegung stoppen............................................................................................................................................20