1
ZVL933.00 Mod: 12-05-2016
ITALIANO
ENGLISH
FRANÇAIS
DEUTSCH
ESPAÑOL
ATTENTION! Before installing this device read the
following instructions carefully!
Conformity declaration Page 2
Important remarks Page 8
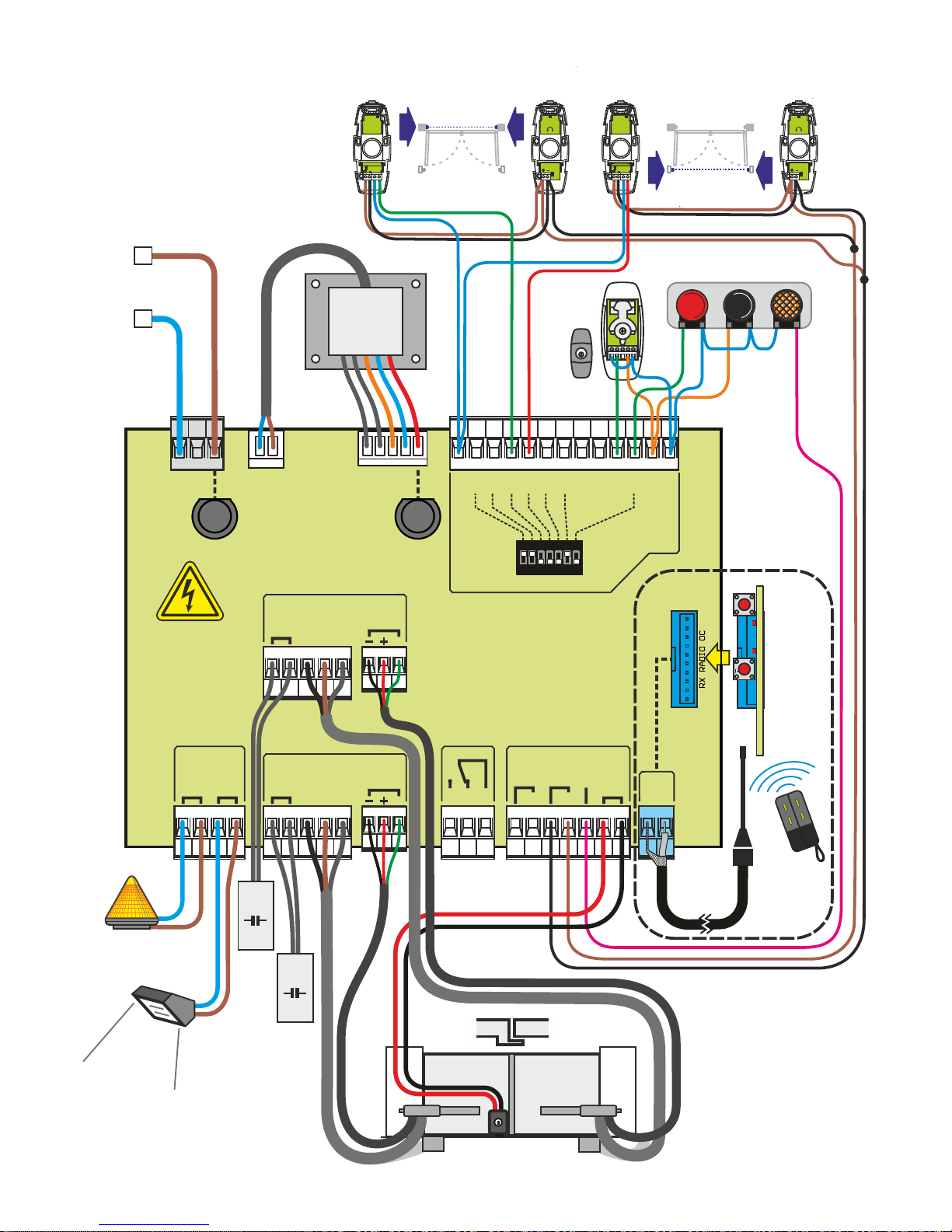
Electrical connection Pages 8-9
Programming procedure Pages 10-11
Remote control Page 12
Function modes Page 12
Indications on the display Page 12
Technical specications Page 28
ATTENTION! Avant de commencer la pose, lire atten-
tivement les instructions!
Déclaration de conformité Page 2
Consignes importantes Page 13
Branchement électrique Pages 13-14
Procédé de programmation Pages 15-16
Commande via radio Page 17
Modes de fonctionnement Page 17
Indications de l’afcheur Page 17
Caractéristiques techniques Page 28
ACHTUNG! Bevor mit der Installation begonnen wird,
sollte die Anleitung aufmerksam gelesen werden.
Konformitätserklarung Seite 2
Wichtige Hinweise Seite 18
Elektrischer Anschluss Seiten 18-19
Programmierverfahren Seiten 20-21
Funkbefehl Seite 22
Betriebsmodus Seite 22
Displayanzeigen Seite 22
Technische Eigenschaften Seite 28
¡ATENCIÓN! Antes de iniciar la instalación del sistema,
leer atentamente las instrucciones.
Declaración de conformidad Página 2
Advertencias importantes Página 23
Conexionado eléctrico Páginas 23-24
Procedimiento de programación Página 25-26
Mando vía radio Página 27
Modalidad de funcionamiento Página 27
Indicaciones en el display Página 27
Datos técnicas Página 28
ATTENZIONE! Prima di iniziare l'installazione leggere
le istruzioni attentamente!
Dichiarazione di conformità Pagina 2
Avvertenze importanti Pagina 3
Collegamento elettrico Pagine 3-4
Procedura di programmazione Pagine 5-6
Comando via radio Pagina 7
Modalità di funzionamento Pagina 7
Indicazioni del display Pagina 7
Caratteristiche tecniche Pagina 28
230 Vac Motors
PROGRAMMATORE ELETTRONICO PER IL COMANDO DI PORTE E PORTONI MOTORIZZATI
ELECTRONIC PROGRAMMER CONTROLLING MOTORISED GATES AND DOORS
PROGRAMMATEURÉLECTRONIQUE POURLACOMMANDEDEPORTESETPORTAILSMOTORISÉS
ELEKTRONISCHERSTEUERUNGSEINHEIT FÜRDIE AUTOMATISIERUNGVON TÜRENUND TOREN
PROGRAMADOR ELECTRONICO PARA EL CONTROL DE LAS PUERTAS MOTORIZADAS
Questo prodotto è stato testato e collaudato nei laboratori della casa costruttrice, la quale ne ha verificato la
perfetta corrispondenza delle caratteristiche con quelle richieste dalla normativa vigente. This product has been
tried and tested in the manufacturer's laboratory who have verified that the product conforms in every aspect to
the safety standards in force. Ce produit a été testé et essayé dans les laboratoires du fabriquant. Pour l'installer
suivre attentivement les instructions fournies. Dieses Produkt wurde in den Werkstätten der Herstellerfirma
auf die perfekte Übereinstimmung ihrer Eigenschaften mit den von den geltenden Normen vorgeschriebenen
getestet und geprüft. Este producto ha sido probado y ensayado en los laboratorios del fabricante, que ha
comprobado la perfecta correspondencia de sus características con las contempladas
por la normativa vigente.
Model Date
Instruction manual Series
PRG230M2 V0.2
01-04-2016
ZVL593.00
CARDIN ELETTRONICA spa
Via del lavoro, 73 – Z.I. Cimavilla
31013 Codognè (TV) Italy
Tel: +39/0438.404011
Fax: +39/0438.401831
Http: www.cardin.it