Figure 4. Status after pressing “Connection”
2.3. Basic sensor parameter configuration
To learn more about IND-TOF-1 operating modes and their setup and functionality,
please refer to the official product user manual.
To learn more about all configurable sensor parameters, please refer to the official
product user manual.
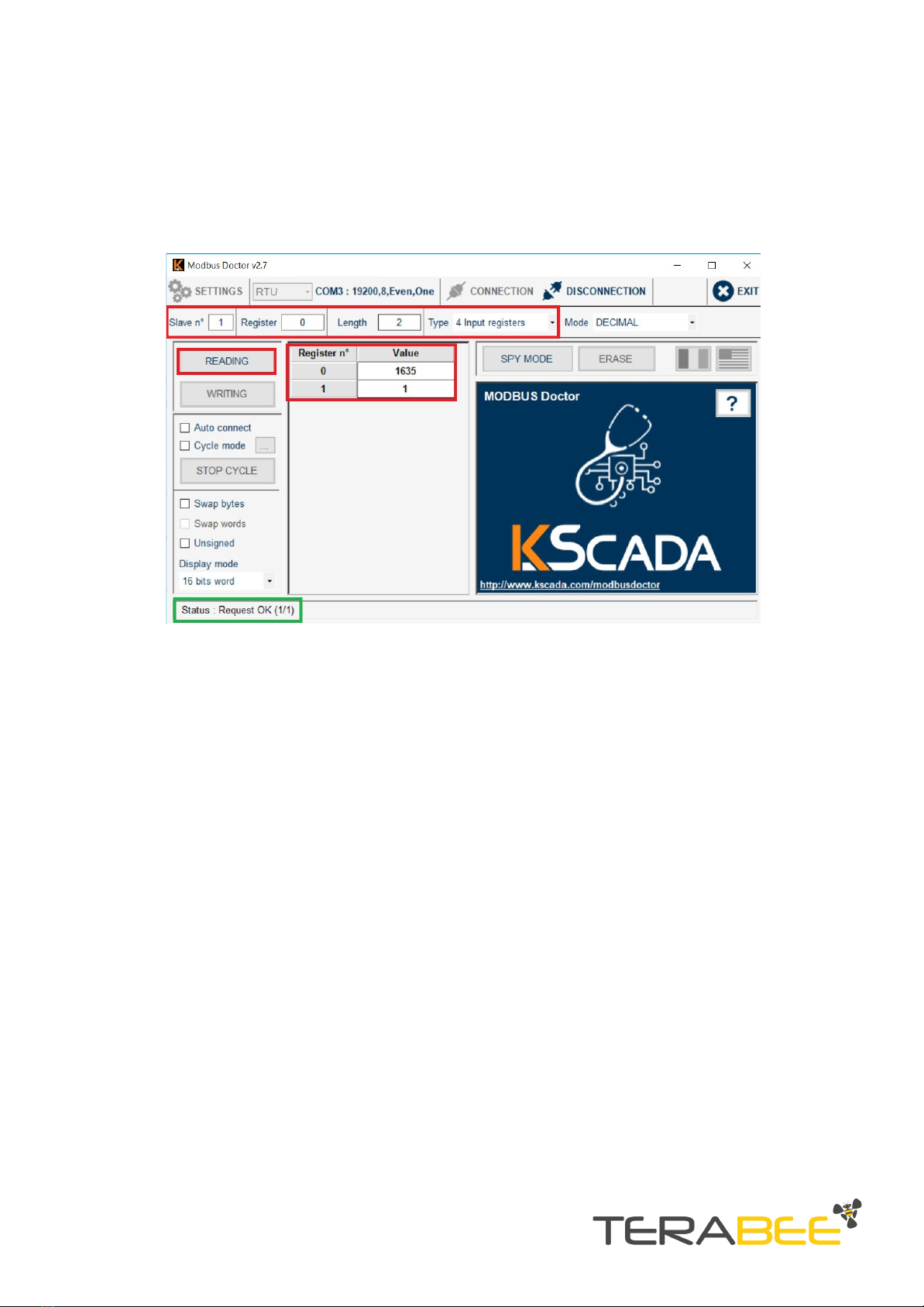
2.3.1. Read distance data example
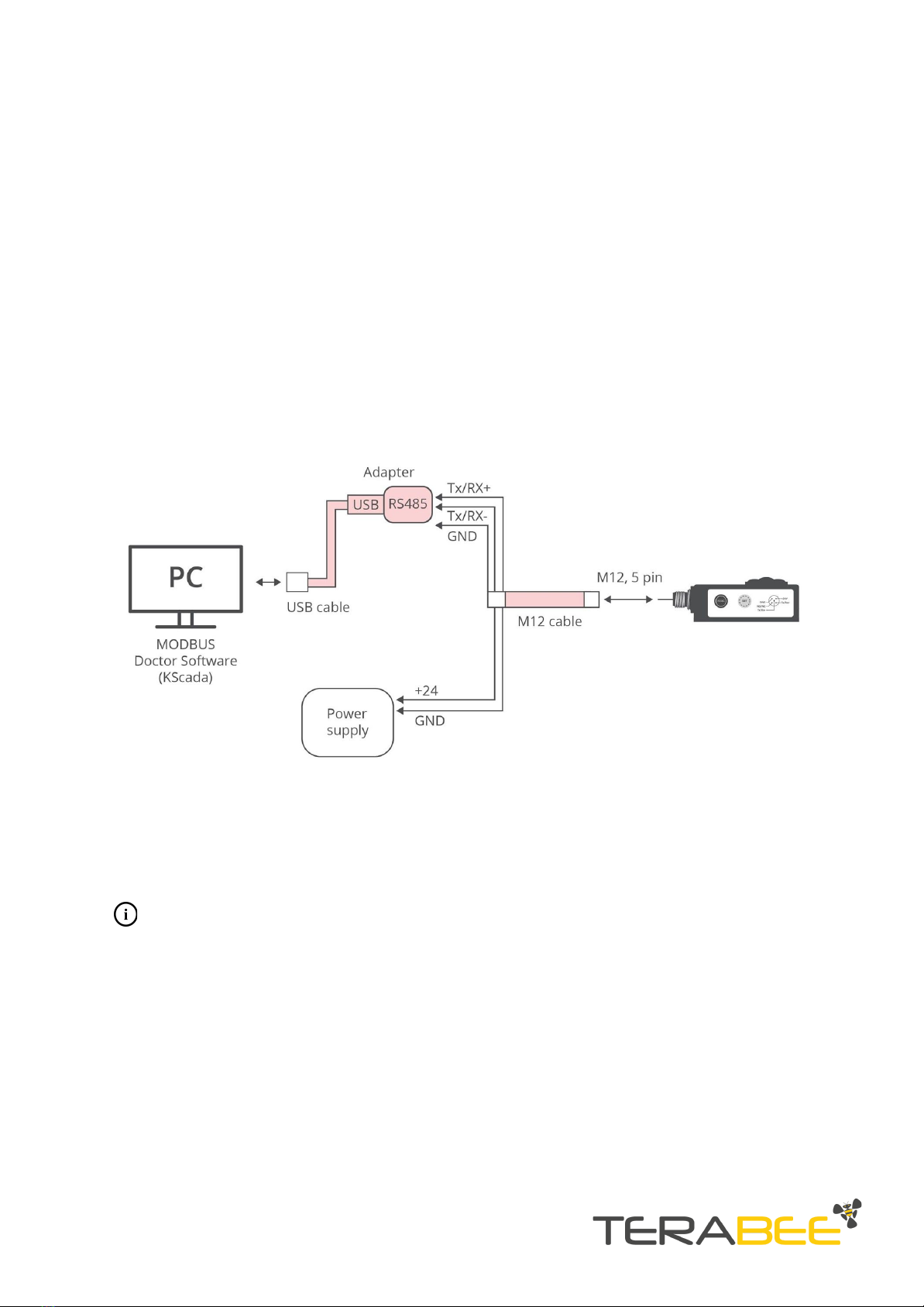
The MODBUS protocol uses a master/slave architecture of communication where one
device or process has unidirectional control over one or more devices. In order to read
(inquire) live distance data from the sensor, please execute the following READ
command:
Read distance data:
●Slave ID: 1 to 247 (enter corresponding slave ID, 1 in our case)
●Type (function): 04 Input Register
●Address location: 0
●Length (Quantity): 2
Click “READING” to execute command. The distance data is now read from the sensor,
and displayed in the “Value” field. During the data read, the sensors onboard LED
indicator (Sel) will blink BLUE to signal that the slave device (sensor) has been
Copyright © Terabee 2019
Terabee, 90 Rue Henri Fabre
01630, St Genis-Pouilly, France (next to CERN)
7/9