Contents
Crane Horizontal Motion | 4
CONTENTS
ABOUT THE MANUAL.................................................................................. 6
ABBREVIATIONS AND DEFINITIONS ......................................................................................................... 6
NUMERICAL REPRESENTATION ............................................................................................................... 6
QUICK PARAMETER REFERENCE, FAULTS AND ALARMS .....................7
FAULTS AND ALARMS ................................................................................9
1 INTRODUCTION TO THE CRANE........................................................... 10
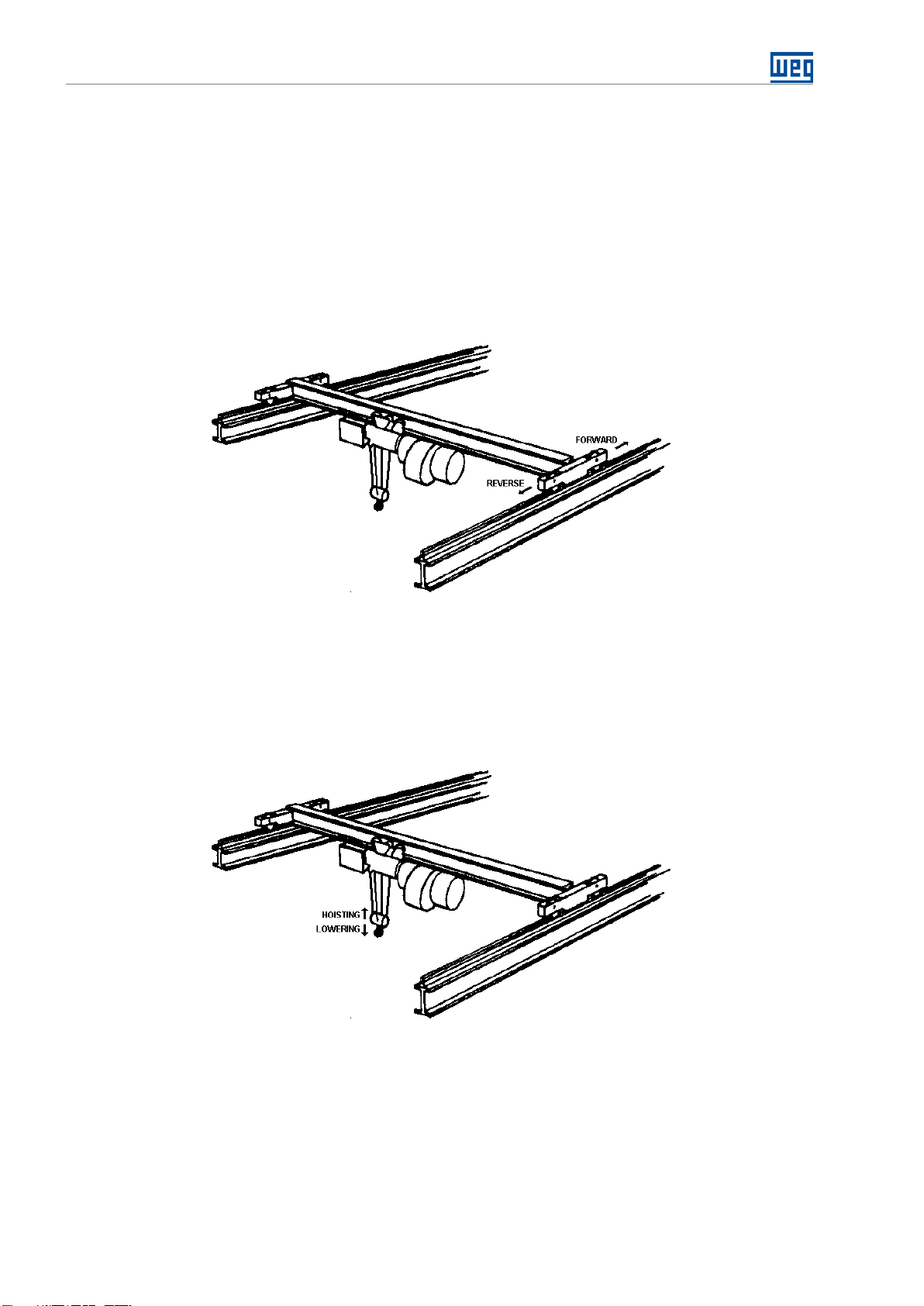
1.1 CRANE HORIZONTAL MOTION.......................................................................................................... 10
1.2 CRANE VERTICAL MOTION................................................................................................................ 10
1.3 FREQUENCY INVERTER USE ADVANTAGES ................................................................................... 11
1.4 PRECAUTIONS IN THE FREQUENCY INVERTER SELECTION ....................................................... 11
1.5 FREQUENCY INVERTER AND BRAKING RESISTOR SELECTION CRITERIA................................ 12
1.5.1 Horizontal Motion
.......................................................................................................................................12
1.5.2 Vertical Motion
............................................................................................................................................12
1.5.3 General Notes
..............................................................................................................................................13
2 CRANE HORIZONTAL MOTION ............................................................. 14
2.1 CONTROL CONNECTIONS ................................................................................................................. 14
2.1.1 Speed Reference via Electronic Potentiometer (EP)
.........................................................................15
2.1.2 Speed Reference via Digital Inputs
........................................................................................................16
2.1.3 Speed Reference via Analog Input AI1
.................................................................................................17
2.1.4 Speed Reference via Communication Networks
...............................................................................18
2.2 BRAKE SYSTEM................................................................................................................................... 19
2.2.1 Connection Diagram
..................................................................................................................................19
3 PARAMETERS DESCRIPTION ................................................................ 21
3.1 ORIGIN OF THE COMMANDS............................................................................................................. 21
3.1.1 Configuration of the Commands
............................................................................................................21
3.2 RAMPS .................................................................................................................................................. 23
3.3 SPEED LIMITS ...................................................................................................................................... 24
3.4 DYNAMIC BRAKING ............................................................................................................................ 25
3.5 SPEED REFERENCES.......................................................................................................................... 25
3.6 CONTROL WORD................................................................................................................................. 29
3.7 CONFIGURATION OF THE LIMIT SWITCHES.................................................................................... 29
3.8 DIGITAL INPUTS................................................................................................................................... 30
3.9 DIGITAL OUTPUTS............................................................................................................................... 35
3.10 ANALOG INPUT .................................................................................................................................. 36
3.11 LIGHTWEIGHT MODE ........................................................................................................................ 37
3.12 BRAKE CONTROL.............................................................................................................................. 40
3.13 MOMENTARY OVERLOAD ................................................................................................................ 45
3.14 INVERTER IN TORQUE LIMIT DETECTION ..................................................................................... 47
3.15 IMPROPER OPERATION ................................................................................................................... 48
3.16 MOTOR UMBALANCED CURRENT.................................................................................................. 49
3.17 HMI MONITORING ............................................................................................................................. 49
3.18 READ-ONLY PARAMETERS.............................................................................................................. 50
3.18.1 Alarm History
.............................................................................................................................................50
3.18.2 Status Word
...............................................................................................................................................51
4 CREATION AND DOWNLOAD THE APPLICATION................................ 53
5 DOWNLOAD DIALOG BOXES................................................................. 58
6 PROJECT TREE ON WLP........................................................................59