•Securethepistonwithoutspringinthesameholeshownabove.
With the barrier open, the spring must NOT be
compressed.
•Installthebeamanditsfixingpocketusingtheprovidedscrews,
asshowninFig.17,ref.fromato h(therubberprofileofthe
beammustfacetheclosingdirection)
Do not grease the xing screw of the bar.
•Ifthe application requiresasegmented bar, oncethefirst
segment and fixing pocket have been assembled, close
theautomatic system, lock it andfollowthe instructions for
additionalsegmentassembly,asshowninFig.20,ref. from
ato d
•Adjusttheopeningandclosingmechanicalstopsasshownin
Fig.15,andtightenthelocknut.
•Ensure that the beam is balanced following the instructions
containedinparagraphs4.5and4.6.
The compartment should be fixed, as shown in the
sequence in Fig. 21, when all mechanical installations,
wiring and start-up have been completed.
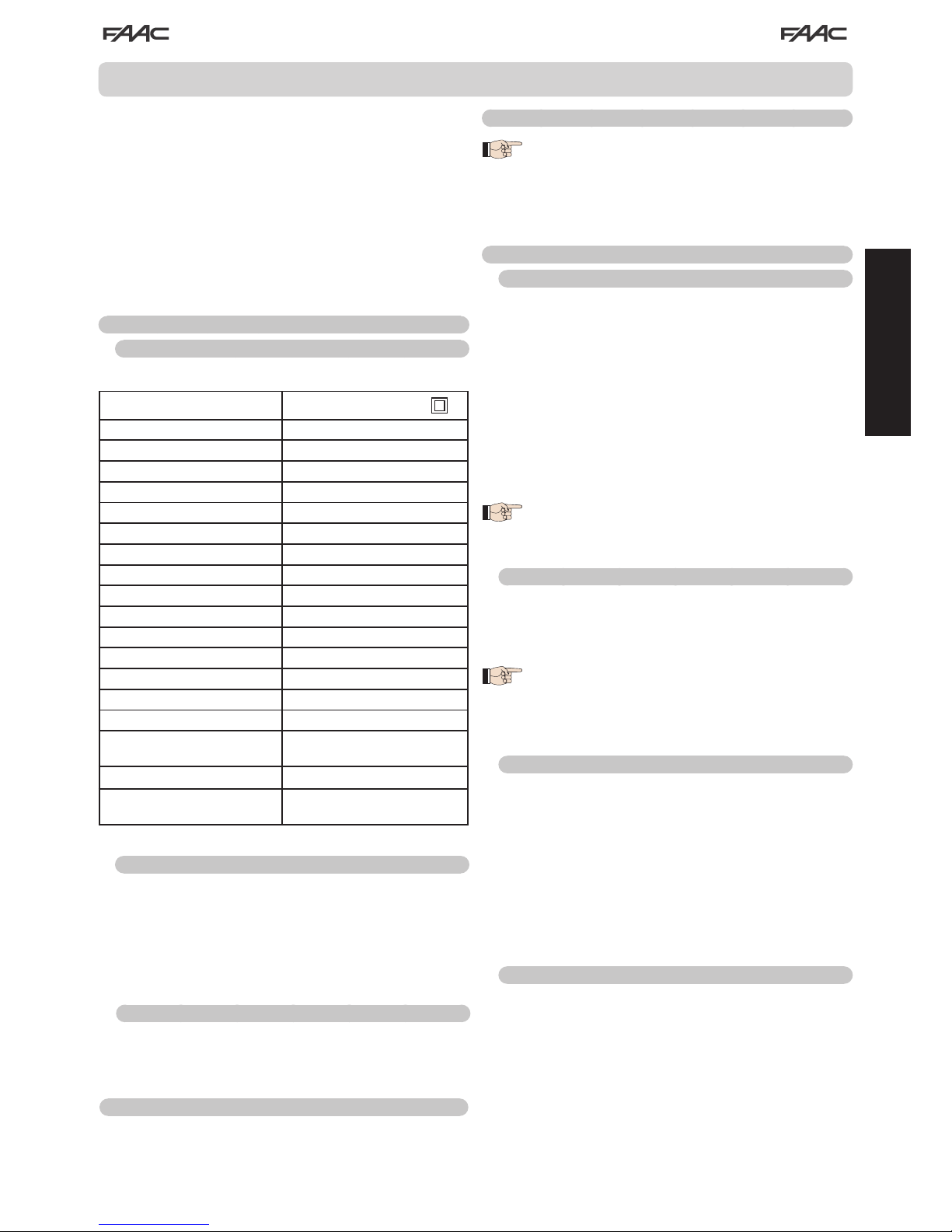
4.5 Fixing the plunging pistons
Barrierbalancingisobtainedbycorrectlyadjustingthespringpreload
ringnut(seenextparagraph)butalsobysettingthetwoplunging
pistonsinthemostsuitableposition.Thispositionisdeterminedby
thelengthofthebeamandthepresenceofanyaccessoriesthat
maybeappliedtoit(seeparagraph11).
4.6 Balancing the barrier
WARNING: This procedure must be carried out as the barrier is
not internally balanced. The beam is balanced when, operating
manually (ref. paragraph 6) the beam remains stationary in the
45° position.
Tobalancethebarrier,proceedasfollows:
•Installthebarandallrelatedaccessoriesonthebarrierstructure,
asrequiredbythefinalconfigurationofthesystem.
• Ensurethattheoperatorisreleased:seeparagraph6.
• Ensurethattheplungingpistonsaresecuredontherockerarm
accordingtotheinstructionsinparagraph11inTable2orTable
3,dependingontheinstalledbeammodel(SorL,respectively)
• Manuallymovethebartothe45°positionandverifyitremains
stationary.Ifthebartendstoopen,turnthespringpreloadring
nutanti-clockwise(Fig.16ref.a);ifittendstoclose,turnthering
• nutclockwise(Fig.16ref.b).
5. START-UP
5.1 Connecting the control equipment
WARNING: Before carrying out any work on the control board
(connections, maintenance, etc.) always cut off the electrical
power.
For all automatic system connections and testing, refer
to the section dedicated to the electronic equipment,
paragraph 1 on page 6 and following.
5.2 Testing the automated system
Onceinstallationhasbeencompleted,applythe"danger"signsticker
(ref.Fig.29)tothetopoftheuprightprofile.Proceedtoensurecorrect
operationoftheautomatedsystemandalltheaccessories
connected to it.
Give the Customer the “User’s Manual”, the
documentation required by current law and show how
to correctly operate the barrier, pointing out the areas
of potential danger.
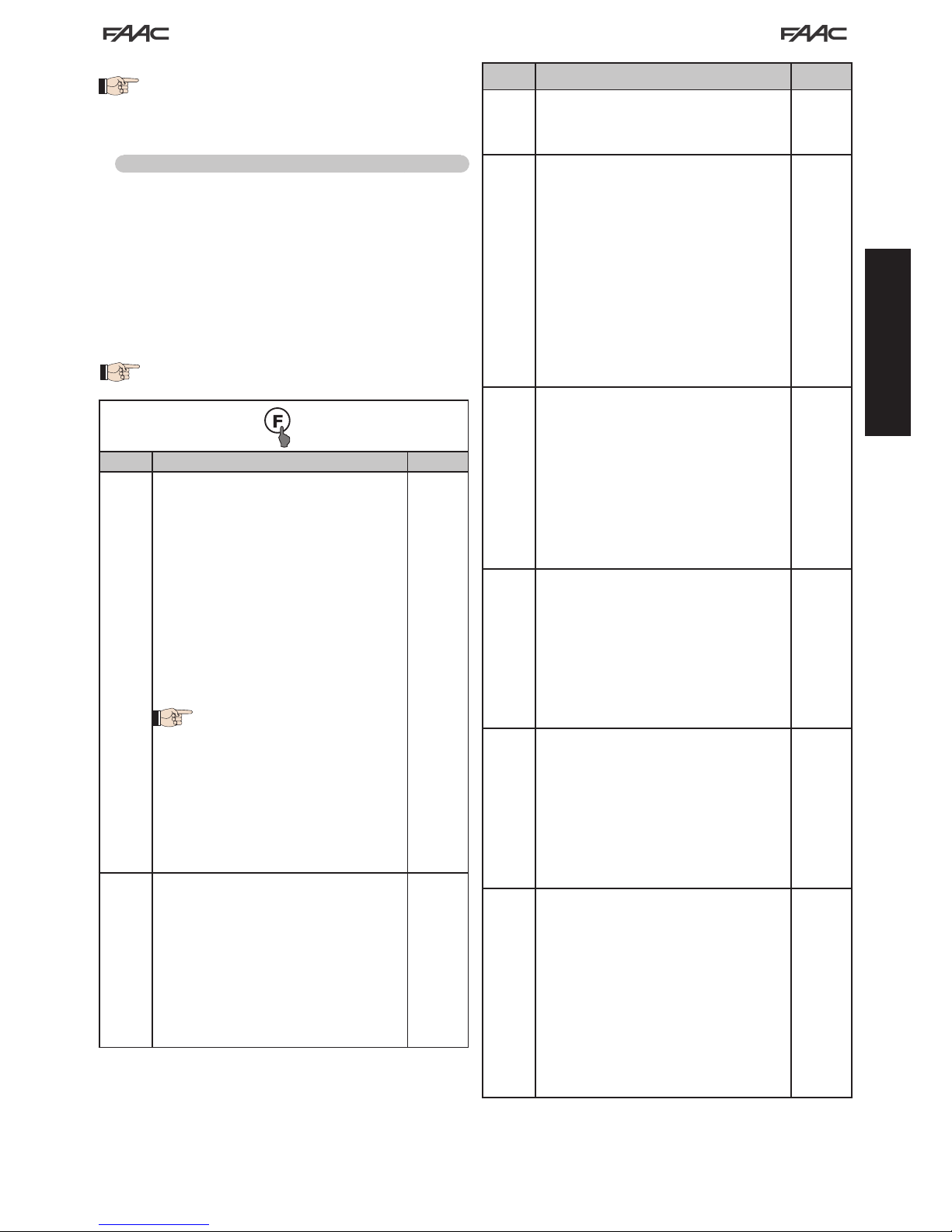
6. MANUAL OPERATION
Shouldmanualoperationofthebarrierberequiredduetoelectrical
power cut-offs or automated system inefficiency, use the release
devicewiththeprovidedkey.
Theprovidedunlockingkeyiseithertriangular(Fig.18ref.a) or
customised(Fig.18ref.boptional).
•Insert the unlocking key in the lock and turn the key
anticlockwiseuntilitclicksintoplace,asshowninFig.18
• Openorclosethebeammanually.
With the bar released, the motor may start for
approximately 3 seconds. This is normal and determined
by the parameter Hold Close / Hold Open
7. RESTORING NORMAL OPERATION
Toavoidanaccidentalpulseopeningthebarrierduringthisoperation,
beforeactivatingthelockingsystem,cutoffallpowertothesystem.
triangular unlocking key (standard):
- turnthekeyclockwiseuntilitstopsandthenremoveit(Fig.18
ref. a).
customised unlocking key (optional):
- turnthekeyclockwiseuntilitstopsandthenremoveit(Fig.18ref.
b).
8. MAINTENANCE
Whenperformingsix-monthmaintenance,alwayscheckthecorrect
balancing of the system and the correct operation of the safety
devices.
8.1 Topping up the oil
Checktheamountofoilinthetankevery6months.
Thelevelmustbeincludedbetweenthetwonotchesontheinspection
rod.
Totopup,unscrewthefillercap(Fig.12ref.a)andpouroilupto
the indicated level.
UseonlyFAACHPOIL.
8.2 Air bleeding
FAACproductsaredeliveredalreadybledofanyairinthehydraulic
circuit. Maintenance operations, replacing spare parts (e.g.
connectionpipes)orcarelesstransportcancauseentryofairinthe
hydrauliccircuit,whichinturncancauseoperatorirregularmovement
orreduceitstorque.Shouldbeammovementbeirregular,release
theairfromthehydraulicsystemfollowingtheinstructionsbelow:
• Electricallyoperatethebeam:
•When opening is completed, slightly loosen and tighten the
bleeder screw of the piston with the balance spring (Fig. 5
ref. d).
•Whenclosing is completed,slightlyloosen and tighten the
bleederscrewofthepistonwithoutthebalancespring(Fig.5
ref. l).
If necessary, repeat the operation until regular movement of the
beam is obtained.
Care needs to be taken at this stage as the pistons
contain oil under pressure which could leak out if the
screws are loosened too much.
If the parameters FO and FC in Advanced
Configuration have been changed and set to a value
lower than default, during bleeding we recommend
setting them to an equal or greater value, to facilitate
air bleeding