5. Parameterise (optional):
– Velocities (SpeedIn/SpeedOut), Force/Torque (Force), Start Press Posi-
tionPosStart Press (PositionStartPress) and End Position LimOut (End Posi-
tionOut) è 10.5 End-to-end operation.
– Reference end position"Ref" (Reference)è 10.4 Homing.
The drive system is ready for operation and can be controlled via the IO-Link inter-
face. With the first motion task and after every restart, the position of the refer-
ence end position "Ref" is re-initialised (drive first moves to the reference end
position "Ref" independently of the motion task before the actual motion task is
executed), LED C/Q flashes green.
– Control end-to-end operation è 10.5 End-to-end operation.
10 Operation
WARNING!
Danger of burns from hot housing surfaces.
Metallic housing parts can reach high temperatures during operation.
Contact with metal housing parts can cause burn injuries.
• Do not touch metallic housing parts.
• After the power supply is switched off, let the device cool down to room tem-
perature.
10.1 Master control
– Lowest priority: DIO operation (after Power ON and initialisation)
– Medium priority: IO-Link operation (after established IO-Link communication)
– Highest priority: HMI operation (unlocked pushbuttons)
10.2 Dimension reference system
The correct positioning of the drive requires a defined dimension reference sys-
tem.
Linear drive system
– Ref: reference end position (reference point for LimIn, LimOut, PosAct and PosStart Press)
– motor facing (default)
– motor facing away
– LimIn/LimOut: end positions
– MechIn/MechOut: mechanical stops
– PosAct: current position
– PosStart Press: start press position
Tab. 2 Dimension reference system for linear drive systems
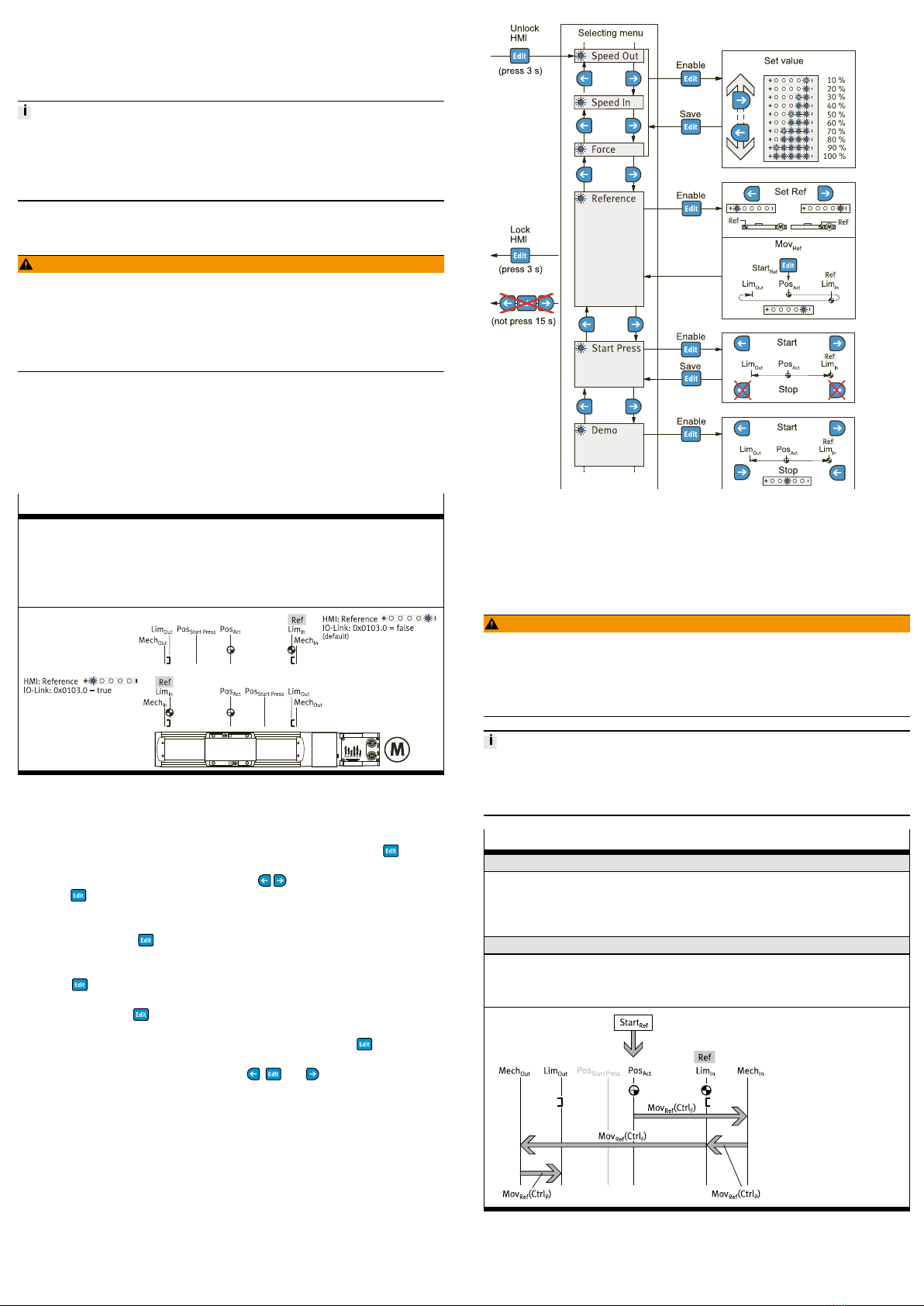
10.3 Display and operating components (HMI)
The display and operating components (HMI) can be used to perform the follow-
ing functions in the HMI menu:
– Unlock pushbutton actuators (Unlock HMI), press and hold for 3s
(Condition for IO-Link operation: IO-Link parameter 0x000C.4 = false)
– Menu function with pushbutton actuators select (selecting menu),
press
– Parameterise setpoint values Speed Out, Speed In and Force
(Set value: 10, 20, ..., 100%of maximum value è 13 Technical data) and
save (Save), press
– Parameterise the position of the reference end position "Ref" (Set Ref) and
run the homing movement MovRef (StartRef: PosActèLimInèLimOut),
press
– Run Start Press movement (Start/Stop) and save Start Press Position PosStart
Press (Save), press
– Execute Demo Run (Start/Stop)
– Lock pushbutton actuators (Lock HMI), press and hold for 3s or no push-
button actuator input for 15s
– Reset to factory setting, press and hold , and simultaneously for 10 s
Fig. 8 HMI menu
10.4 Homing
During homing, the positions of the mechanical stops MechIn/MechOut are determ-
ined in order to calculate the end positions LimIn (Ref)/LimOut for the dimension
reference system.
Before the homing run is carried out, the drive is de-energised for a required re-
initialisation. Then the power supply is restored and the homing process starts.
WARNING!
Risk of injury due to unexpected movement of components.
When starting the homing run, the drive is disconnected from the power supply
for a short time. This can cause unexpected movements of the connected mechan-
ics and crush parts of the body.
• Bring moving parts of the connected mechanical system into a safe position.
• A new homing is only necessary if the reference end position Ref or the usable
range is changed.
• When homing, the Start Press Position PosStart Press is equated with the new
end position LimOut.
Homing
Parameterise reference end position "Ref"
HMI:
– Menu, Reference è 10.3 Display and operating components (HMI)
IO-Link (acyclic device data):
– motor facing (default): 0x0103.0, reference=false
– motor facing away: 0x0103.0, reference=true
Control homing
HMI:
– StartRef: menu, reference
è 10.3 Display and operating components
(HMI)
IO-Link (acyclic device data):
– StartRef:
0x0104.0, execute MovRef=true
Tab. 3 Parameterising and controlling homing
10.5 End-to-end operation
In end-to-end operation with or without press function, the unit can be moved
between the end positions LimIn/LimOut.