animeo KNX RS485 Motor Controller WM 2017-06-30
animeo KNX RS485 Motor Controller WM . Ref. 5134039A 10/31
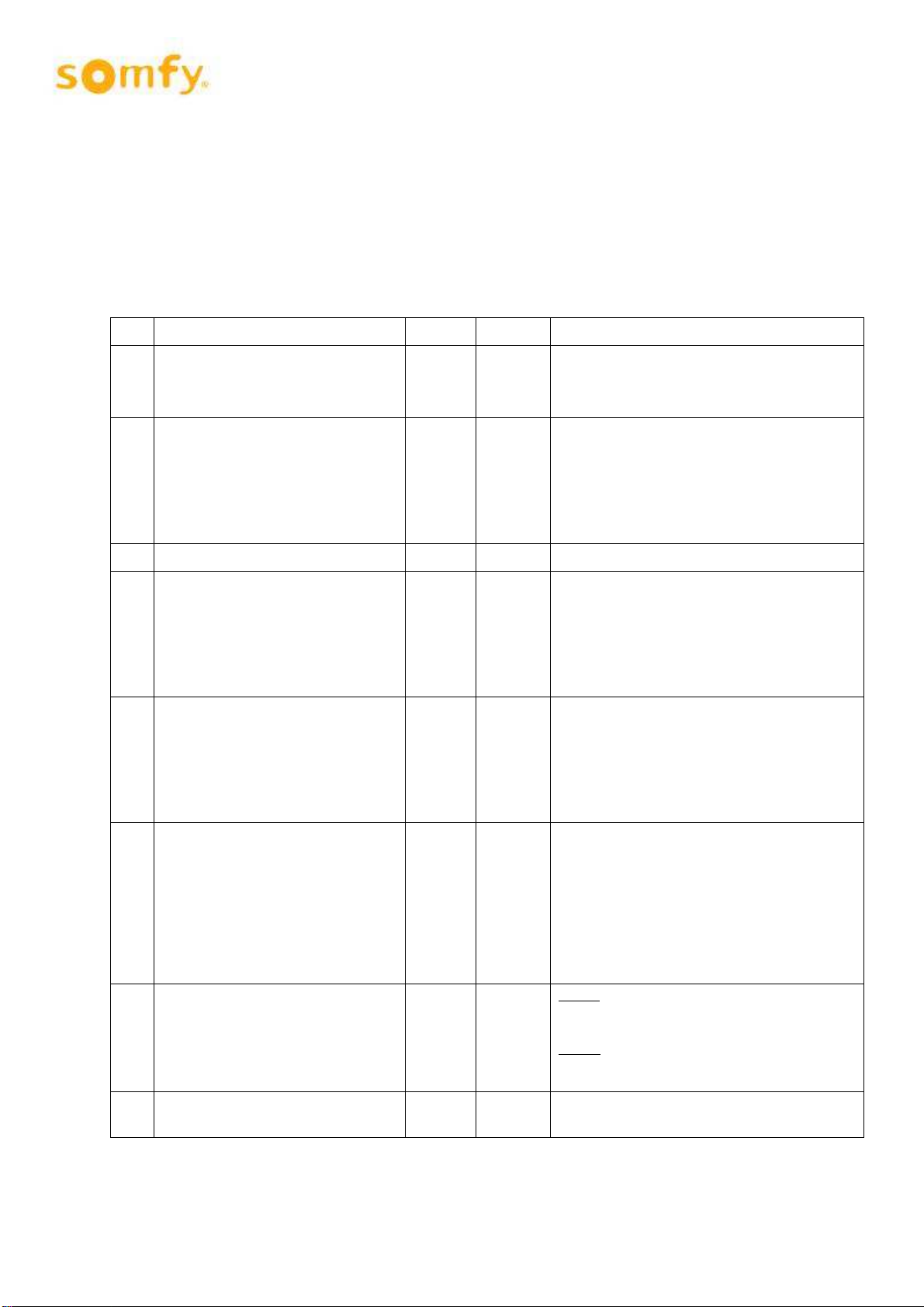
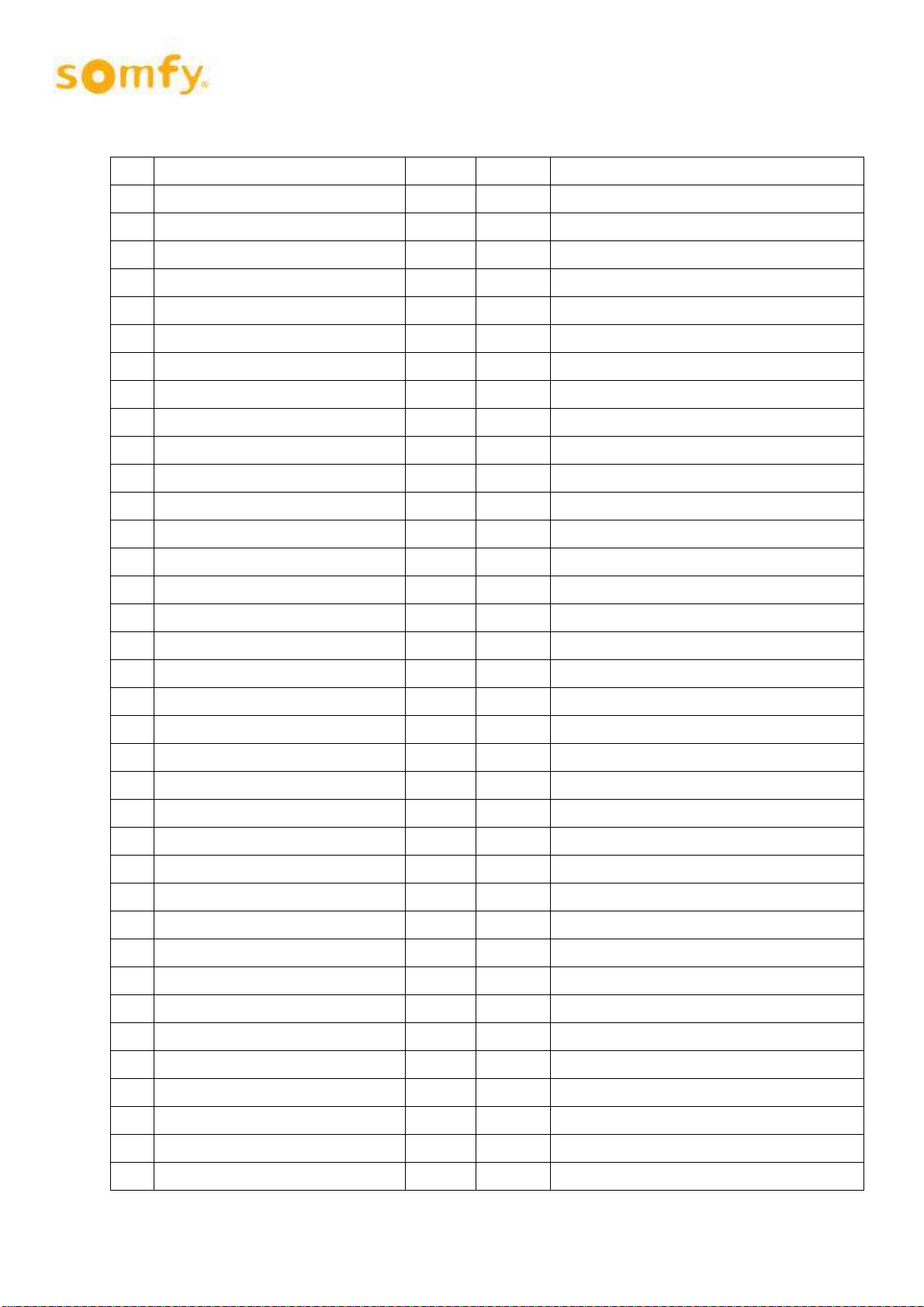
No. Object name Model DPT_ID Description
153 Command Group 1
Up/Down
1 Bit 1.008 If a telegram with the value "0" is received on this
communication object, the appropriate blind goes up.
If a telegram with the value "1" is received, the appro-
priate blind goes down.
154 Command Group 1
Dedicated Stop 1 Bit 1.017 If the end product is in a full moving process, it stops
with the receipt of a telegram on the object, regard-
less of whether a telegram with the value "0" or "1" is
received. If the end product is in passive state, then
with the receipt of a telegram on this communication
object no action is executed.
155 Command Group 1
Position 1 Byte 5.001 If this communication object receives a telegram, the
appropriate blind will go into the position which is de-
fined by the received value.
"0" = UP "100" = DOWN
156 Not used
157 Command Group 1
Move to IP1 1 Bit 1.008 If a telegram with the value "1" is received on this
communication object, the blind goes to the interme-
diate position 1 which was configured by local switch
or parameterized in the ETS parameters. The last po-
sition which has been configured is active. Receiving
a telegram with the value "0" on this communication
object the appropriate blind goes to the upper end
position.
158 Command Group 1
Move to IP2 1 Bit 1.008 If a telegram with the value "1" is received on one of
these communication objects, the corresponding
blind moves to the intermediate position 2 parameter-
ized in the ETS parameters. Receiving a telegram
with the value "0" on one of these communication ob-
jects, the corresponding blind moves to the upper
end position.
159 Command Group 1
Security low prio 1 Bit 1.001 If a telegram with the value "1" is received on this
communication object, the blind goes to the position
which was parameterized in the ETS parameters.
When the communication object receives a telegram
with value "0" no action will be executed. Only with
the selection "Restore previous position after security
(Yes)" in the ETS parameters this action will be exe-
cuted on the blind. If this communication object is ac-
tive through a telegram with the value "1" and if then
on the communication object 160 (security position,
high priority) a telegram with value "1" is received, the
blind will move to the position configured in the ETS
parameters (security position, high priority).
160 Command Group 1
Security high prio 1 Bit 1.001 If a telegram with the value "1" is received on this
communication object, the blind goes to the position
which was parameterized in the ETS parameters.
When the communication object receives a telegram
with value "0" no action will be executed. Only with
the selection " Restore previous position after secu-
rity (Yes)" in the ETS parameters this will be exe-
cuted in the blind. If an object for security position,
low priority is active ("1"), the blinds will go to the pa-
rameterized position for the low priority.