Thank you for buying this product, our company is sure that you will be more
than satisfied with its performance.
This product is supplied with an “Instruction Manual”which should be read
carefully as it provides important information about safety, installation,
operation and maintenance.
This product complies with recognised technical standards and safety
regulations. We declare that it is in conformity with the following European
Directives: 89/336/EEC, 73/23/EEC and subsequent amendments.
1) GENERAL SAFETY
WARNING! An incorrect installation or improper use of the product
can cause damage to persons, animals or things.
•The “Warnings”leaflet and “Instruction booklet”supplied with this
product should be read carefully as they provide important information
about safety, installation, use and maintenance.
•Scrap packing materials (plastic, cardboard, polystyrene etc) according
to the provisions set out by current standards. Keep nylon or polystyrene
bags out of children’s reach.
•Keep the instructions together with the technical brochure for future
reference.
•This product was exclusively designed and manufactured for the use
specified in the present documentation. Any other use not specified in
this documentation could damage the product and be dangerous.
•The Company declines all responsibility for any consequences resulting
from improper use of the product, or use which is different from that
expected and specified in the present documentation.
•Do not install the product in explosive atmosphere.
•The construction components of this product must comply with the
following European Directives: 89/336/CEE, 73/23/EEC, 98/37/EEC
and subsequent amendments. As for all non-EEC countries, the above-
mentioned standards as well as the current national standards should
be respected in order to achieve a good safety level.
•The Company declines all responsibility for any consequences resulting
from failure to observe Good Technical Practice when constructing
closing structures (door, gates etc.), as well as from any deformation
which might occur during use.
•The installation must comply with the provisions set out by the following
European Directives: 89/336/CEE, 73/23/EEC, 98/37/EEC and
subsequent amendments.
•Disconnect the electrical power supply before carrying out any work on
the installation. Also disconnect any buffer batteries, if fitted.
•Fit an omnipolar or magnetothermal switch on the mains power supply,
having a contact opening distance equal to or greater than 3mm.
•Check that a differential switch with a 0.03A threshold is fitted just before
the power supply mains.
•Check that earthing is carried out correctly: connect all metal parts for
closure (doors, gates etc.) and all system components provided with an
earth terminal.
•Fit all the safety devices (photocells, electric edges etc.) which are
needed to protect the area from any danger caused by squashing,
conveying and shearing.
•Position at least one luminous signal indication device (blinker) where
it can be easily seen, and fix a Warning sign to the structure.
•The Company declines all responsibility with respect to the automation
safety and correct operation when other manufacturers’components
are used.
•Only use original parts for any maintenance or repair operation.
•Do not modify the automation components, unless explicitly authorised
by the company.
•Instruct the product user about the control systems provided and the
manual opening operation in case of emergency.
•Do not allow persons or children to remain in the automation
operation area.
•Keep radio control or other control devices out of children’s reach, in
order to avoid unintentional automation activation.
•The user must avoid any attempt to carry out work or repair on the
automation system, and always request the assistance of qualified
personnel.
•Anything which is not expressly provided for in the present instructions,
is not allowed.
2) GENERAL OUTLINE
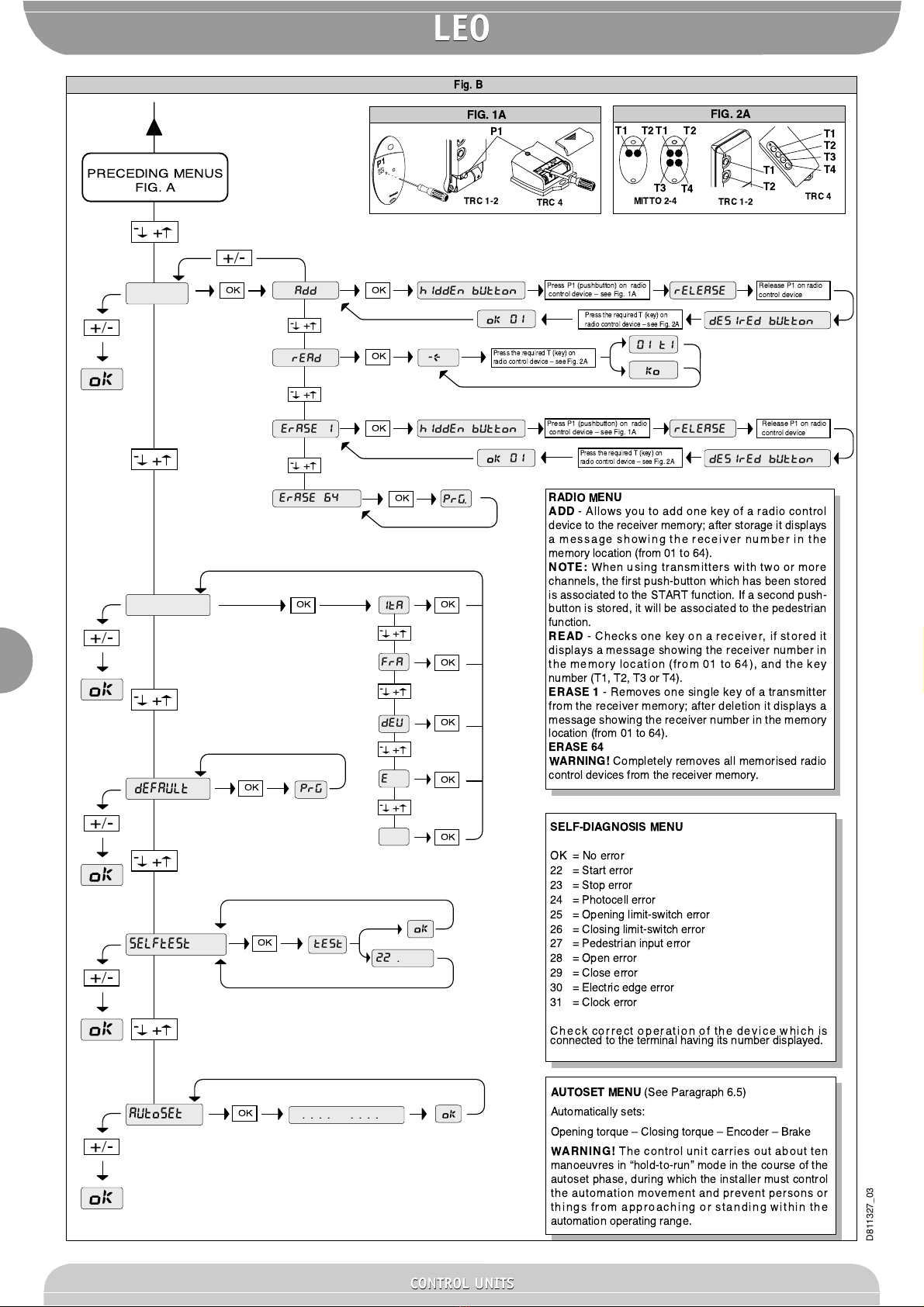
The LEO control panel is supplied by the manufacturer with standard
setting. Any alteration must be set by means of the incorporated display
programmer or by means of UNIPRO. The Control unit completely supports
the EELINK protocol, including the programmer self-supply from the control
unit.
It is available in two versions: one for external installation, inside the SD
box, the other fitted and pre-wired inside the ICARO controller.
Its main characteristics are:
- Electronic torque setting
- Adjustable electrodynamic braking
- Closing / opening limit-switch inputs
- Separate inputs for safety devices
- Clock input
- Serial protocol connection input
- Incorporated radio receiver
The board is provided with a terminal board which can be pulled out for
easier maintenance or replacement. The board is supplied with a series of
pre-wired jumpers to facilitate the installer’s work.
The jumpers relate to the following terminals: 21-23, 21-24 and 21-30. If the
above-mentioned terminals are in use, remove their respective jumpers.
3) TECHNICAL SPECIFICATIONS
Power supply: ................................................................ 230V±10% 50Hz*
Mains/low voltage insulation: ....................................... > 2MOhm 500Vdc
Dielectric strength: ..................... mains/low voltage 3750Vac for 1 minute
Motor output current: .................................................................... 1.5Amax
Maximum motor power: ................................................................... 750W
Supply to accessories: ................................... 24Vac (1A max absorption)
Gate-open warning light: ................................................... 24Vac 3W max
Blinker: ............................................................................... 230V 40W max
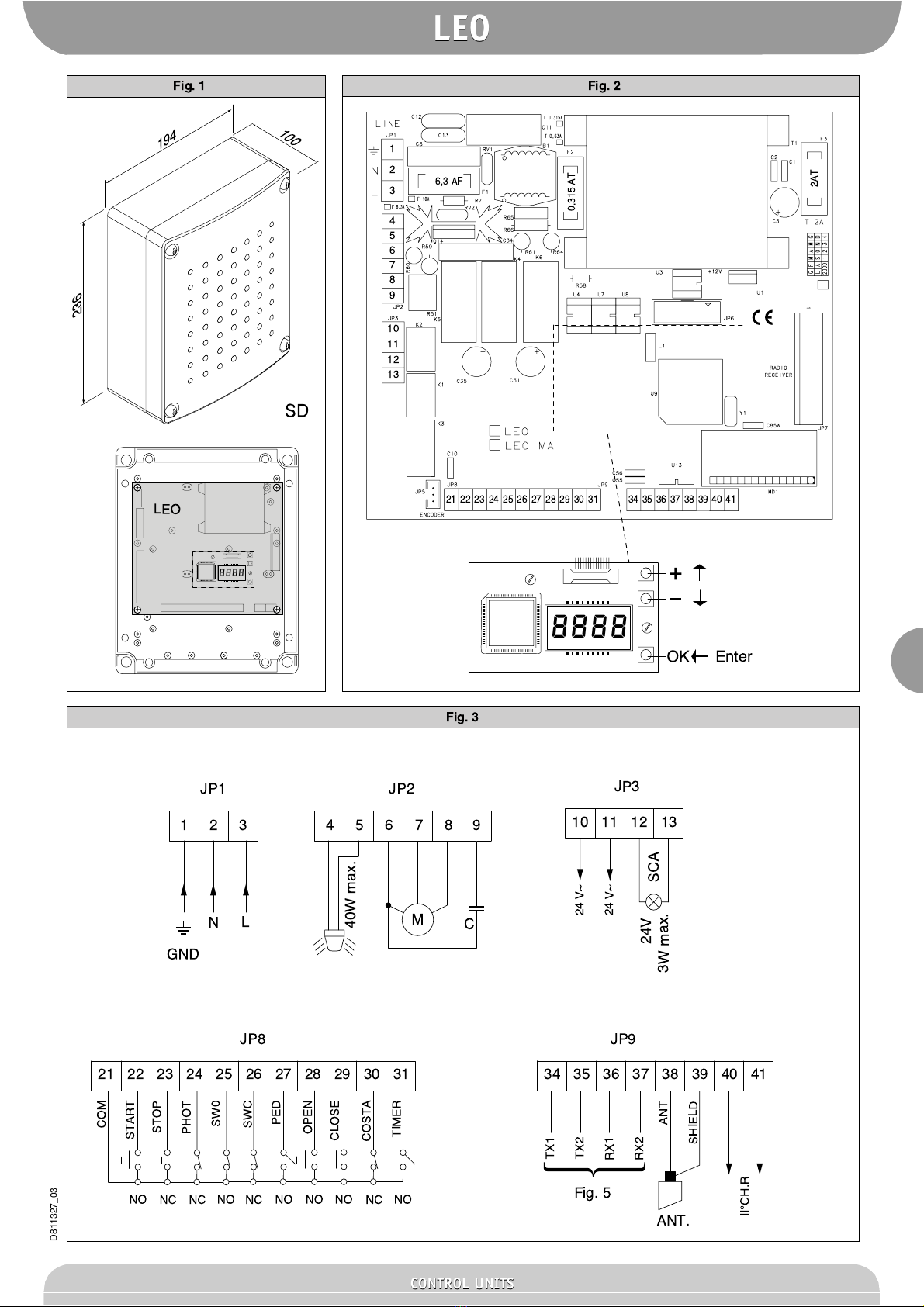
Dimensions: ............................................................................. see figure 1
Fuses: ...................................................................................... see figure 2
(* other voltages available on request)
4) TERMINAL BOARD CONNECTIONS (Fig.3)
WARNING –During the wiring and installation operations, refer to the
current standards as well as principles of good technical practice.
The cables must be tied by additional fastening next to the terminals, by
means of clips for example.
All the operator wiring operations must be carried out by qualified personnel.
JP1
1
GND terminal
2-3 Single-phase mains supply 230V±10% 50Hz (2=N) (3=L)
JP2
4-5 Blinker connection (mains voltage) 40W Max.
6-7-8-9 Motor connection:
6 operation 1 + capacitor
7 common (blue)
8 operation 2
9 capacitor
JP3
10-11 Output 24V~ 1A max –power supply for photocells or other
devices.
12-13 Gate-open warning light output (24V 3W max)
JP5 Encoder connection
WARNING! The maximum length of the connection cable of
the encoder should not exceed 3.00 mt.
JP8
21-22 Open-Close button (N.O. Start), key selector.
21-23 Block button (N.C. Stop). If not used, leave jumped.
21-24 Photocell input (N.C.). If not used, leave jumped.
21-25 Opening limit switch connection (N.C. SWO). If not used,
leave jumped.
21-26 Closing limit switch connection (N.C. SWC). If not used, leave
jumped.
21-27 Pedestrian button connection (N.O. Ped)
21-28 Open-Button connection (N.O. Open)
21-29 Close-Button connection (N.O. Close)
21-30 Rubber edge connection (N.C.). If not used, leave jumped.
21-31 Timer input connection (N.O.). If the contact is open the leaves
close and the gate is ready for normal operation. If the contact
is closed (N.C.), the leaves open and remain open until the
contact is opened.
JP9
34 TX1 serial output
35 TX2 serial output
36 RX1 serial imput
37 RX2 serial input
38-39 Antenna input for snap-in radio receiver board (38 signal - 39
braid). Cable RG58
40-41 Second radio channel output of twin-channel receiver board