other connected devices (overall control), regardless of their configuration
(master or slave).If a system requires more than 8 zones, it is possible to
define different addresses from 8 to 127 using the UNIPRO universal
programmer and setting the number of the zone in the advanced parameter
“Address 1”. In this case, the address programmed using the UNIPRO will
prevail over the one programmed using the DIP switches. To return to the
configuration function using the dip switches, set the advanced parameter
“Address 1”to 0, using the UNIPRO, or erase the memory completely as
described below (in this case all information stored in the board will be
erased). A centralized wire system can be created both by closing the loop
(carrying out the connections marked with a broken line in fig.5 and setting
to ON the dip switch n°4 of the master boards), or by leaving the loop open
(without carrying out the connections marked with a broken line in fig.5 and
leaving on OFF the dip switch n°4 of all boards).
When the loop is closed, each zone master checks the execution of the
commands by the slave boards and updates a part of the statistics relating
to the loop composition. The unsuccessful commands will be repeated after
a few minutes. When the loop is open, these operations are not possible
while all the other functions remain unaltered. The panels preset for radio
control can also be connected via wire. In this case, and when they are
defined as master, or overall control master devices, only the centralised
radio controls related to the T2, T3 and T4 keys (stop, open and close) are
sent via cable, whereas the T1 key (four-step logic) operates locally and is
not sent via cable.
NOTE: The maximum number of devices, including master and slave
types, which can be connected to an individual network, is equal to 255,
consequently a master panel can control up to a maximum of 254 slave
panels.
In the case of installations with a high number of slave panels, the
transmission delay of a command sent by the master to the subsequent
slave device is about 0.5s. Therefore, to give an example, the 50th slave
panel on the line will have a delay in executing the command of about 25s
with respect to the master panel.
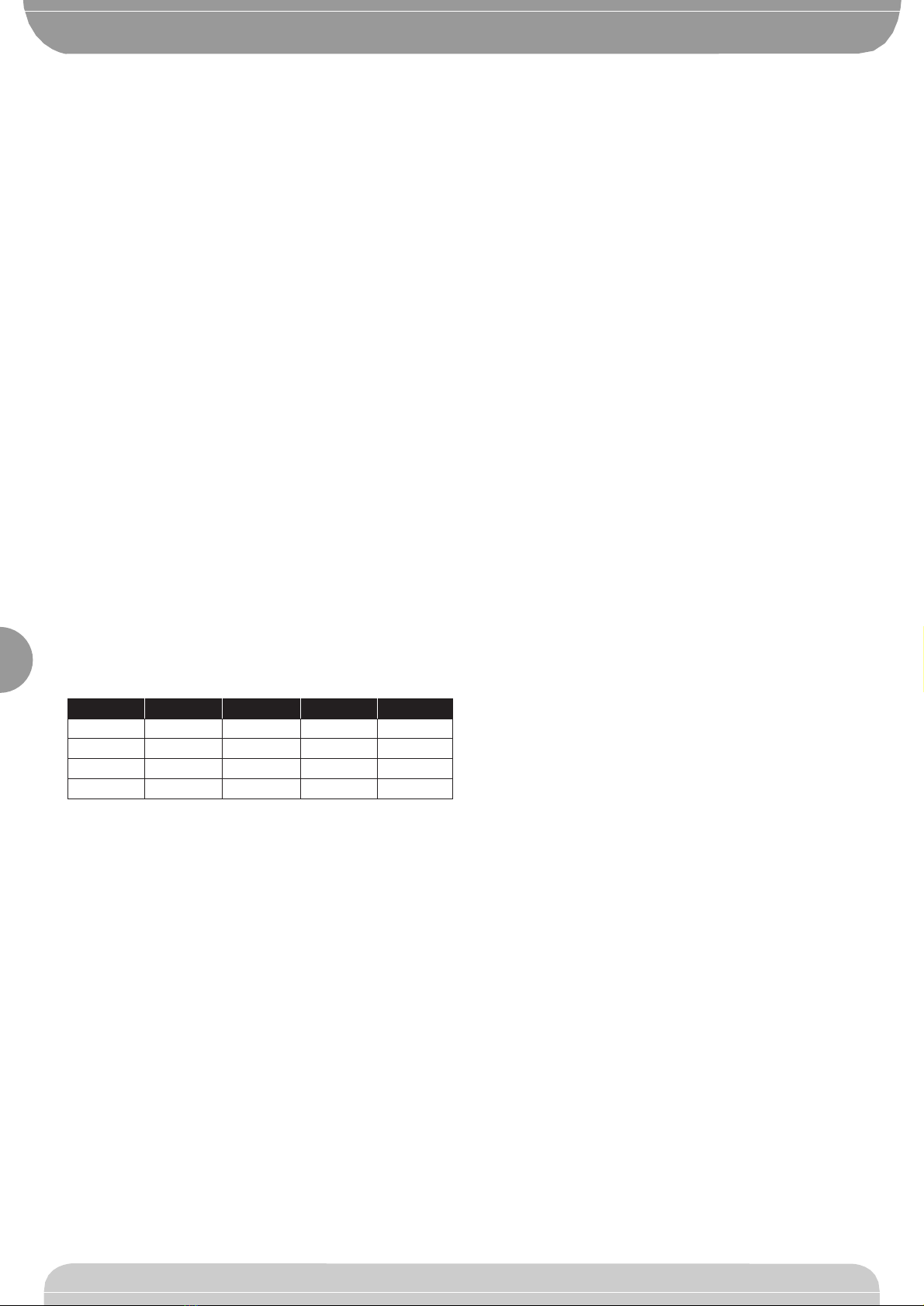
7) ANEMOMETER CONFIGURATION
The anemometer can be connected as described in paragraph 4 (fig.4) to
obtain the automatic closure when the wind speed is greater than a certain
preset threshold. The threshold causing the anemometer to step in is set by
using the DIP switches n°1 and 2. The table given below shows the
approximate speed of the wind corresponding to the threshold relating to
theaccessory P111182 (anemometer performing 2impulses per revolution):
Dip n°1 Dip n°2Threshold Hz m/s km/h
OFF OFF 11,5 4,2 15
OFF
ON
ON
ON
OFF
ON
23
35
47
8,4
12,6
16,8
30
45
60
The control of the anemometer on the master board acts in a
centralized way, while the controls of the anemometer on the slave
boards act locally.
8) TWILIGHT SWITCH
It is possible to connect a twilight switch (see paragraph and fig.4).
The closure of the twilight switch contact originates a closing command in
the actuator. When the contact re-opens, it originates an opening command
in the actuator. The twilight control of the master board acts in a centralized
way, while the twilight commands of the slave boards only act locally.
9) SAFETY DEVICE
In case of automatic or semi-automatic control, it is possible to connect a
safety device (see paragraph and fig.4) as may be prescribed by the safety
standards. The opening of the contact during the closing phase originates
an opening command. Such a command only acts locally.
The safety device can be supplied with 24Vac power from the terminals 19
and 20 (max 70mA).
10) HOLD-TO-RUN CONTROLS
By setting to ON the dip Switch n°3 the input controls of the board become
hold-to-run controls. In this case, the functions of the receiver and external
sensors are inhibited. In case of a centralized wire system, the command
originated by the serial network are not processed.
11) RADIO CONTROL (FOR MOD. CAPRI RIC ONLY)
The radio-controls combined with the CAPRI RIC control board, can
feature 1, 2 or 4 keys. The functions of each key are the following:
Key 1: local control with 4-step logic (the first impulse opens, the second
impulse stops on opening, the third impulse closes, the fourth
stops on closing).
Key 2: local and zone stop control.
Key 3: local and zone opening control.
Key 4: local and zone closing control.
11.1) MANUAL PROGRAMMING OF RECEIVER
For receiver programming, press the key S1 located on the Capri board, the
LED DL1 will flash with a frequency of 2Hz to confirm that the transmitters
are operating in the self-learning mode. Press the key hidden by the
transmitters with 1 or 2 keys (see fig.8) within 10 seconds or jump the 4-key
transmitters (see fig.8). The LED DL1 will stay on permanently. Press the
correct key of the transmitter within 10 seconds. When selecting the key,
bear in mind that if the key 1 is pressed after pressing the hidden key, all
the keys of the transmitter are stored in the receiver. If the key 2 is pressed,
the keys 2, 3, 4 will be stored. If the keys of the transmitters are stored
correctly on the different receivers, a centralized system can be obtained
without connecting the control boards to one another. To this purpose, use
single-channel or double-channel transmitters for local commands or four-
channel transmitters for centralized commands. An example is given in
figure 7: the TX1 has been stored using the key 1 on the CAPRI 1 control
unit and using the key 2 on the CAPRI 2 and CAPRI 3 control units.
Furthermore, the transmitter TX2 has been stored in CAPRI 2 control unit
using the key 1 while the transmitter TX3 has been stored in the CAPRI 3
control unit always using the key T1. Under these circumstances, the key
T1 of the transmitter TX1 will control the motor M1 based on the 4-step logic
M1 (local control) and the keys T2,T3 and T4 of the transmitter TX1 will
control stopping, opening and closing of all the 3 motors respectively
(centralized control). The transmitters TX2 and TX3, on the other hand,
perform a local command with 4-step logic onto M2 and M3 respectively.
By repeating the method, it is possible to perform the centralized control of
several zones with great flexibility as far as activation and subdivision are
concerned. Obviously, with this type of centralized control, the commands
sent by wire (opening, closing, stop, photocell, twilight sensor, anemometer
metro) will only be of local nature.
11.2) RADIO PROGRAMMING OF RECEIVER
After manual programming of the first radio-control, it is possible to perform
a radio programming (without having to operate on the control unit again).
To start this programming mode, press the hidden key of a transmitter
already programmed and then press a key on the same transmitter within
10 seconds. In this way, the transmitter operated by the control unit will
switch to self-learning mode and it will be possible to execute all the steps
described for the manual programming of the receiver.
11.3) PROGRAMMING OFTHERECEIVERUSING THEEELINKPROTOCOL
The receiver can also be programmed using the EElinkprotocol, connecting
the UNIPRO terminal by means of the UNIFLAT and UNIDA accessories.
Before connecting the UNIDA accessory to the board, remove the jumper
J1. Upon completion of cancellation, remember to reposition the jumper J1
on pin 1 and 2 of the connector JP3, otherwise the parameters stored in the
board will not be protected from accidental overwriting. The arrangement
of the connections is shown in fig. 8. When programming the receiver make
reference to the instructions for the UNIPRO terminal. Up to 64 radio-
controls can be stored and the control unit can control both standard and
personalized radio-controls. As far as the arrangement of the outputs is
concerned, the control unit CAPRI acts as a 4-channel receiver in which the
outputs have the following functions regardless of the mode programmed:
Output 1: local control with 4-step logic (the first impulse opens, the
second impulse stops on opening, the third impulse closes,
the fourth stops on closing).
Output 2: local and zone stop control.
Output 3: local and zone opening control.
Output 4: local and zone closing control.
The control unit CAPRI does not supply power to the programming
terminal. For transmitter personalization, use the UNITRC and UNIFLAT
accessories and follow the instructions supplied with the programmer.
Note: the personalization of a transmitter acts in an irreversible way
on the code stored therein. The personalized code can be changed but
the transmitter cannot be configurated as standard again.
12) ERASURE OF STORAGE
To erase the storage of the board, move the jumper J1 on pin 2 and 3 of
connector JP3, press the key S1 for 10 seconds. The LED DL1 flashes with
a frequency of 5Hz and then stays on permanently for a few seconds until
the storage has been erased. This operation will erase all data from the
board memory, and its configuration will be the same as the original one set
by the manufacturer. Upon completion of cancellation, remember to





 User manual")