Operation Manual EMGZ 490
15.12.2015 2
Table of Content
1Safety Instructions................................................................................ 4
1.1 Description Conditions .....................................................................................................4
1.2 List of safety instructions.................................................................................................4
2Product Description.............................................................................. 6
2.1 Product Range...................................................................................................................6
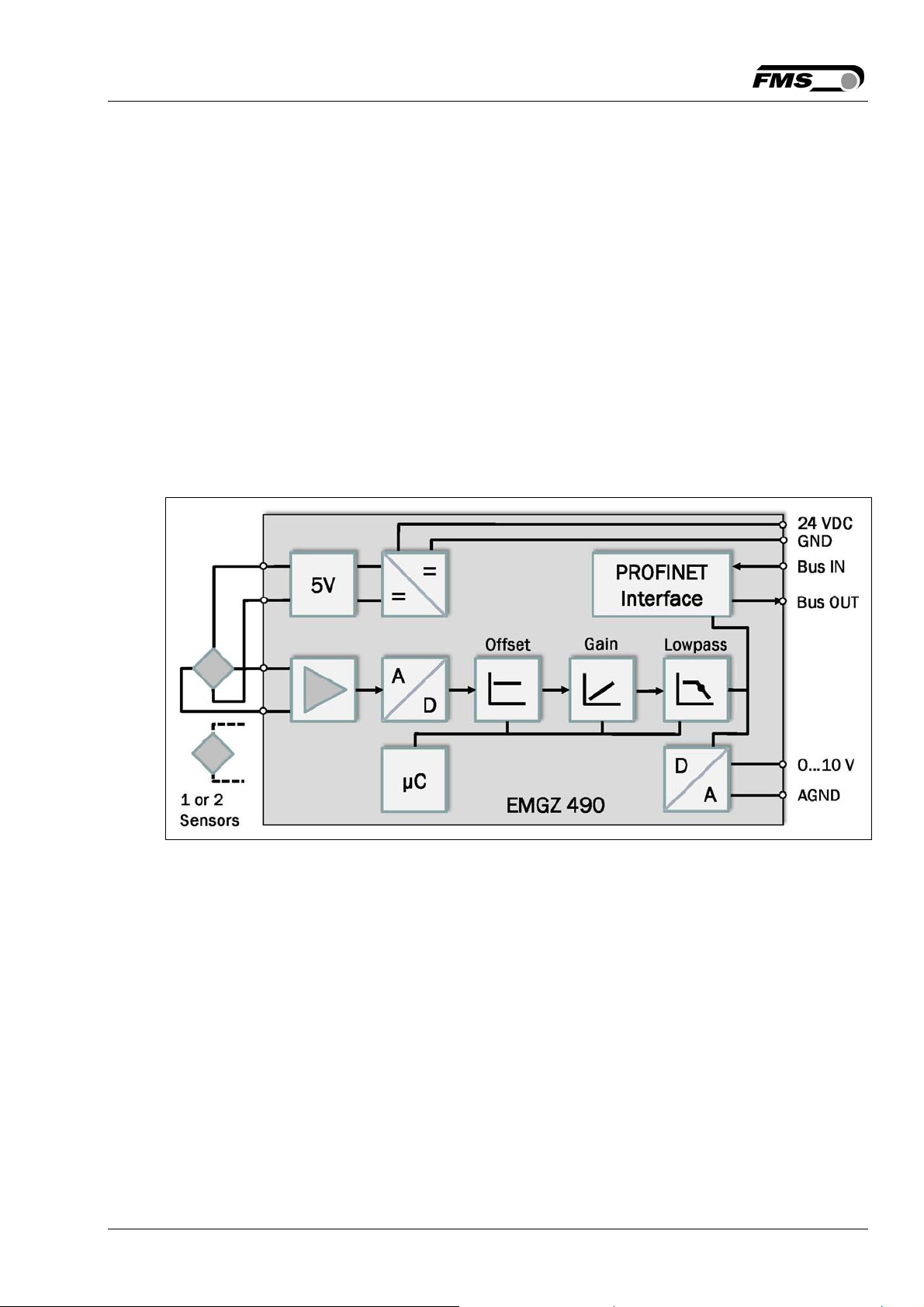
2.2 Block Diagram EMGZ 490...............................................................................................6
2.3 System Description EMGZ 490.......................................................................................6
3Quick Installation Guide ...................................................................... 7
3.1 Preparations for Set-up ....................................................................................................7
3.2 Installation Procedure ......................................................................................................7
3.3 Installation and Wiring.....................................................................................................7
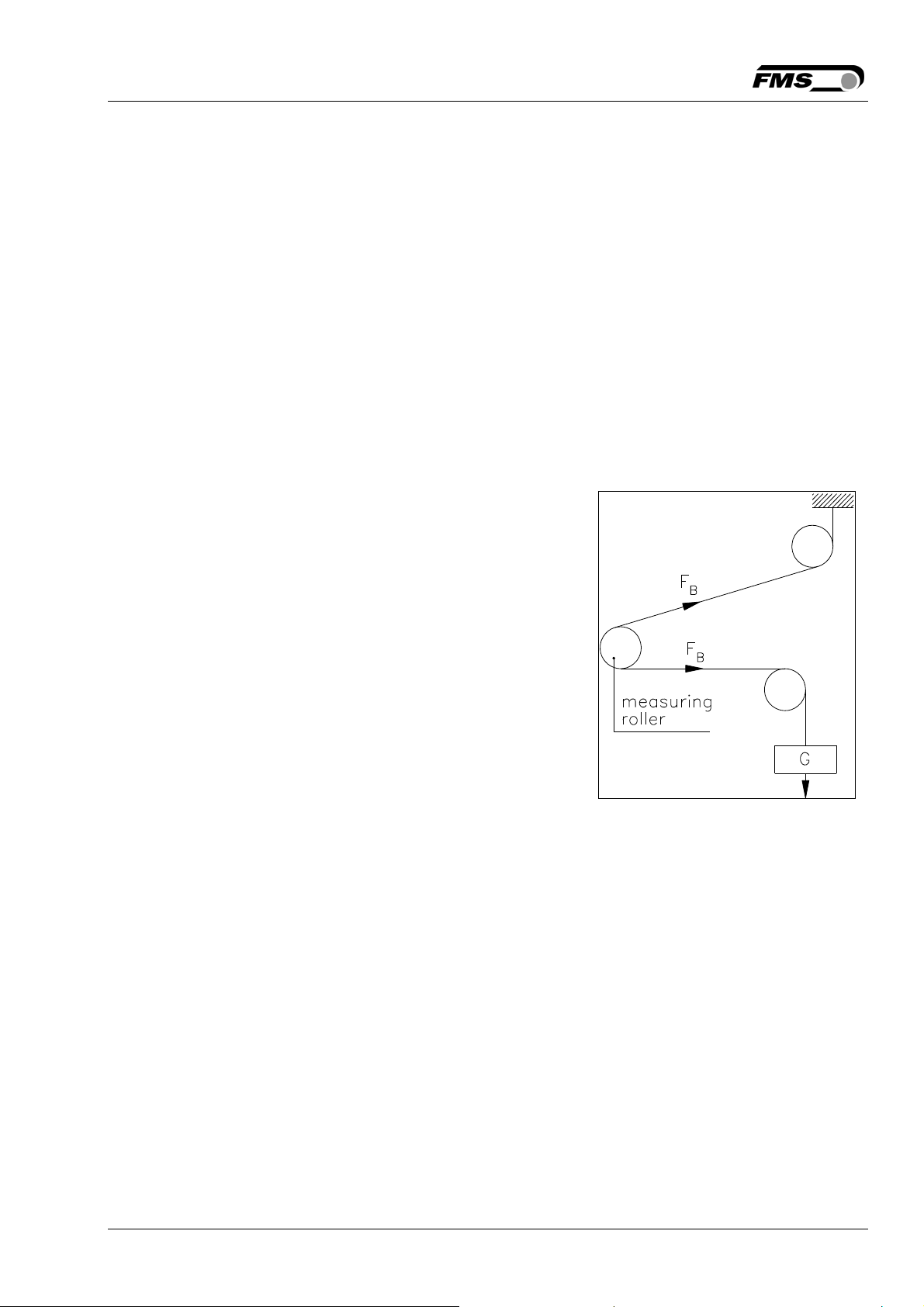
3.4 Mounting the Force Sensors............................................................................................7
3.5 Wiring the Amplifier..........................................................................................................8
4Calibration of the Measuring System ................................................ 9
4.1 Offset Compensation........................................................................................................9
4.2 Calibration..........................................................................................................................9
4.3 Calibration Procedure.................................................................................................... 10
4.4 Gain .................................................................................................................................. 10
4.5 Limit Violations............................................................................................................... 11
4.6 Description of Signal-LEDs ........................................................................................... 12
5Integration in a PROFINET-network..................................................13
5.1 PROFINET Interface ...................................................................................................... 13
5.2 MAC - Address................................................................................................................. 13
5.3 Assignment of MAC - Addresses.................................................................................. 13
5.4 TCP/IP Configuration..................................................................................................... 14
5.5 System Start-up.............................................................................................................. 15
5.6 Data Exchange................................................................................................................ 15
6Configuration.......................................................................................16
6.1 Description of Parameters............................................................................................ 16
6.2 Cyclic Data Traffic .......................................................................................................... 18
6.3 Acyclic Data Traffic ........................................................................................................ 19
7PROFINET Communication ...............................................................21
7.1 General Function ............................................................................................................ 21
7.2 Services and Protocols .................................................................................................. 21
7.3 Limitations ...................................................................................................................... 22
7.4 Functional Blocks, Example ......................................................................................... 22
7.5 Data Blocks..................................................................................................................... 23
7.6 Trigger Read-/Write-instructions.................................................................................. 24
7.7 Configuration File GSDML............................................................................................. 25
7.8 Tools ................................................................................................................................. 25
8Web Interface......................................................................................26
8.1 Access to the Amplifier over a Web Interface ........................................................... 26