Operation Manual EMGZ490A
30.08.2019 2
Table of Content
1 Safety Instructions .......................................................................... 4
1.1 Description Conditions ............................................................................................... 4
1.2 List of safety instructions ........................................................................................... 5
2 Product Description ........................................................................ 6
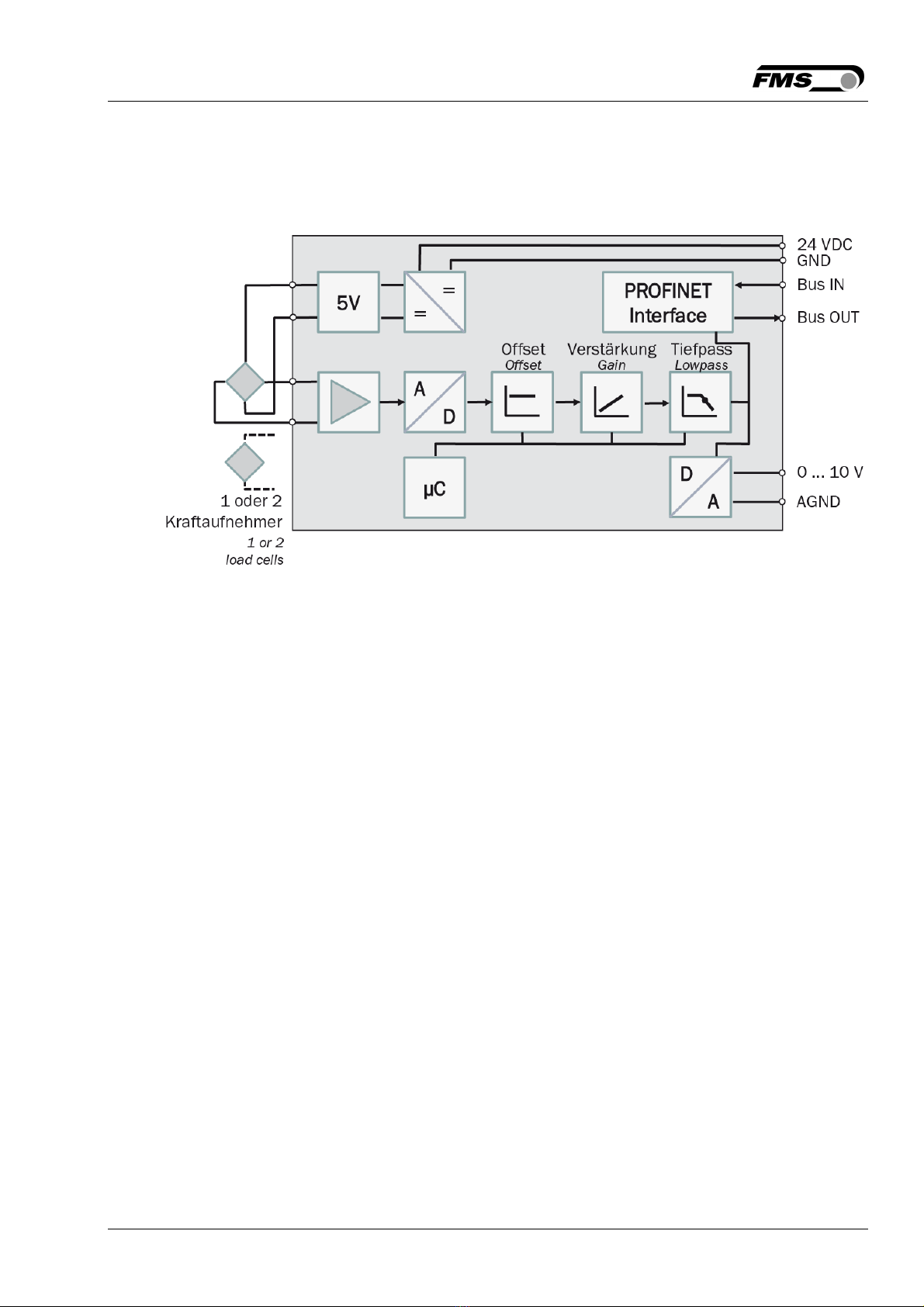
2.1 Block Diagram EMGZ490A ........................................................................................ 6
2.2 System Description EMGZ490A ................................................................................. 6
3 Quick Installation Guide ................................................................. 7
3.1 Preparations for Set-up .............................................................................................. 7
3.2 Installation Procedure ................................................................................................ 7
3.3 Installation and Wiring ............................................................................................... 7
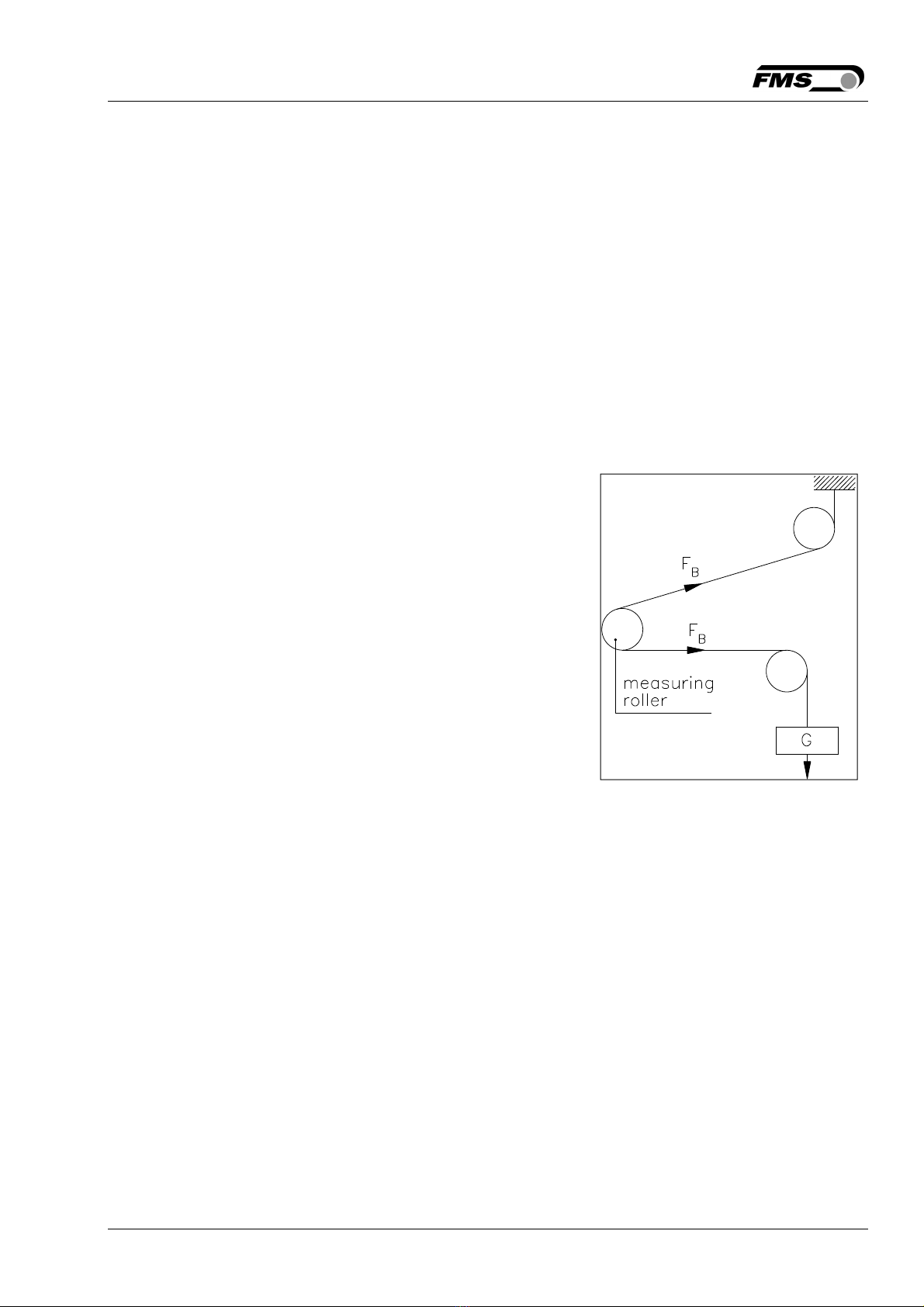
3.4 Mounting the Force Sensors ...................................................................................... 7
3.5 Wiring the Amplifier .................................................................................................... 8
4 Calibration of the Measuring System ........................................... 10
4.1 Offset Compensation ................................................................................................ 10
4.2 Calibration ................................................................................................................. 10
4.3 Calibration Procedure ............................................................................................... 11
4.4 Gain ........................................................................................................................... 12
4.5 Limit Violations ......................................................................................................... 13
4.6 Description of Signal-LEDs ....................................................................................... 14
5 Integration in a PROFINET-network .............................................. 14
5.1 PROFINET Interface ................................................................................................. 14
5.2 TCP/IP Configuration ................................................................................................ 15
5.3 System Start-up ........................................................................................................ 15
5.4 Data Exchange .......................................................................................................... 15
6 Configuration ................................................................................ 16
6.1 Description of Parameters ....................................................................................... 16
6.2 Cyclic Data Traffic ..................................................................................................... 18
6.3 Acyclic Data Traffic ................................................................................................... 19
7 PROFINET Communication ........................................................... 21
7.1 General Function ....................................................................................................... 21
7.2 Services and Protocols ............................................................................................. 21
7.3 Limitations ................................................................................................................ 22
7.4 Functional Blocks, Example ..................................................................................... 23
7.5 Data Blocks ............................................................................................................... 24
7.6 Trigger Read-/Write-instructions .............................................................................. 25
7.7 Configuration File GSDML ........................................................................................ 26
7.8 Tools ......................................................................... Fehler! Textmarke nicht definiert.
8 Web Interface ............................................................................... 27
8.1 Access to the Amplifier over a Web Interface ......................................................... 27
8.2 Parameter Setting .................................................................................................... 29