TABLE of CONTENTS
1. INTRODUCTION ...................................................................................................................................................1
1.1 THEORY OF OPERATION.......................................................................................................................................1
2. INSTALLATION ....................................................................................................................................................2
2.1 PRELIMINARY TESTS............................................................................................................................................2
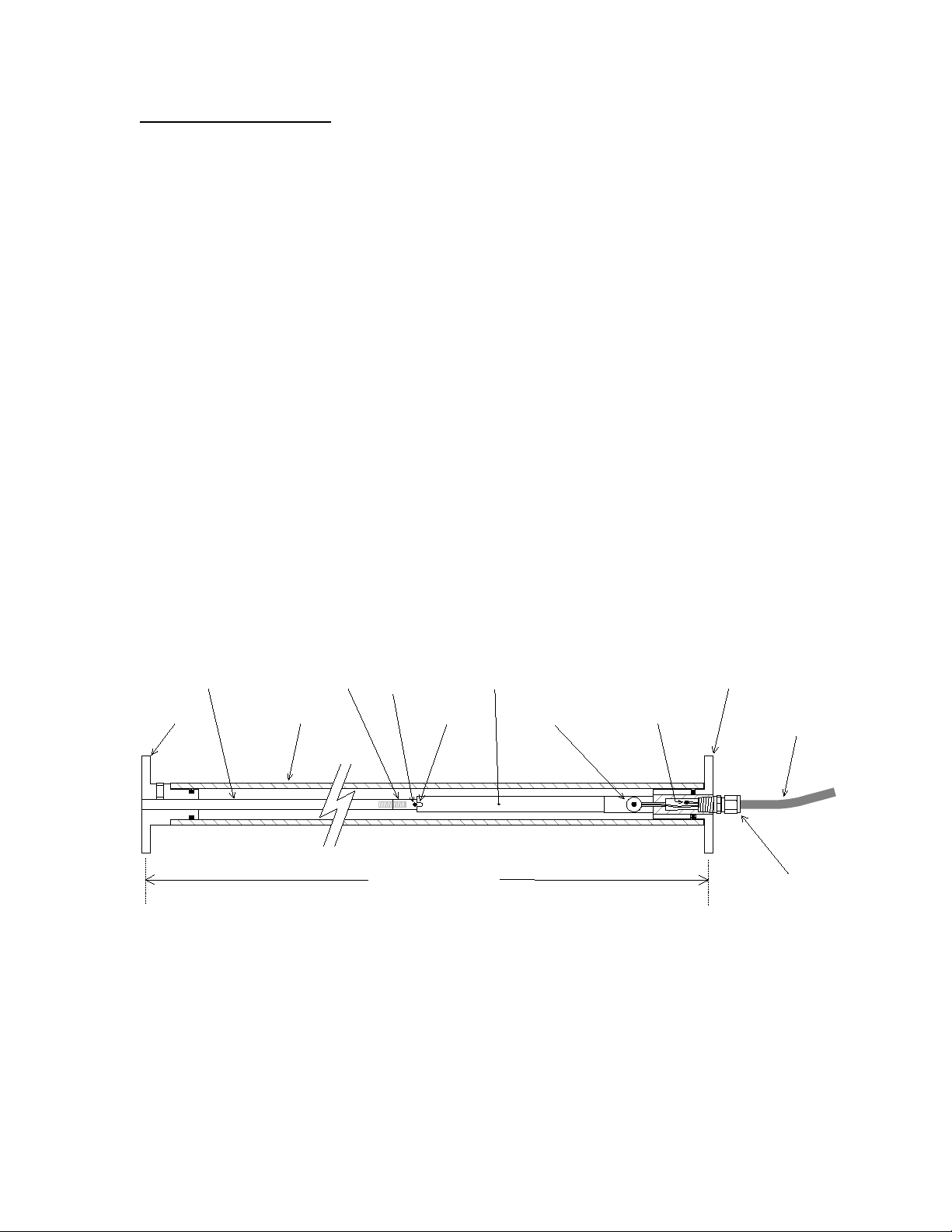
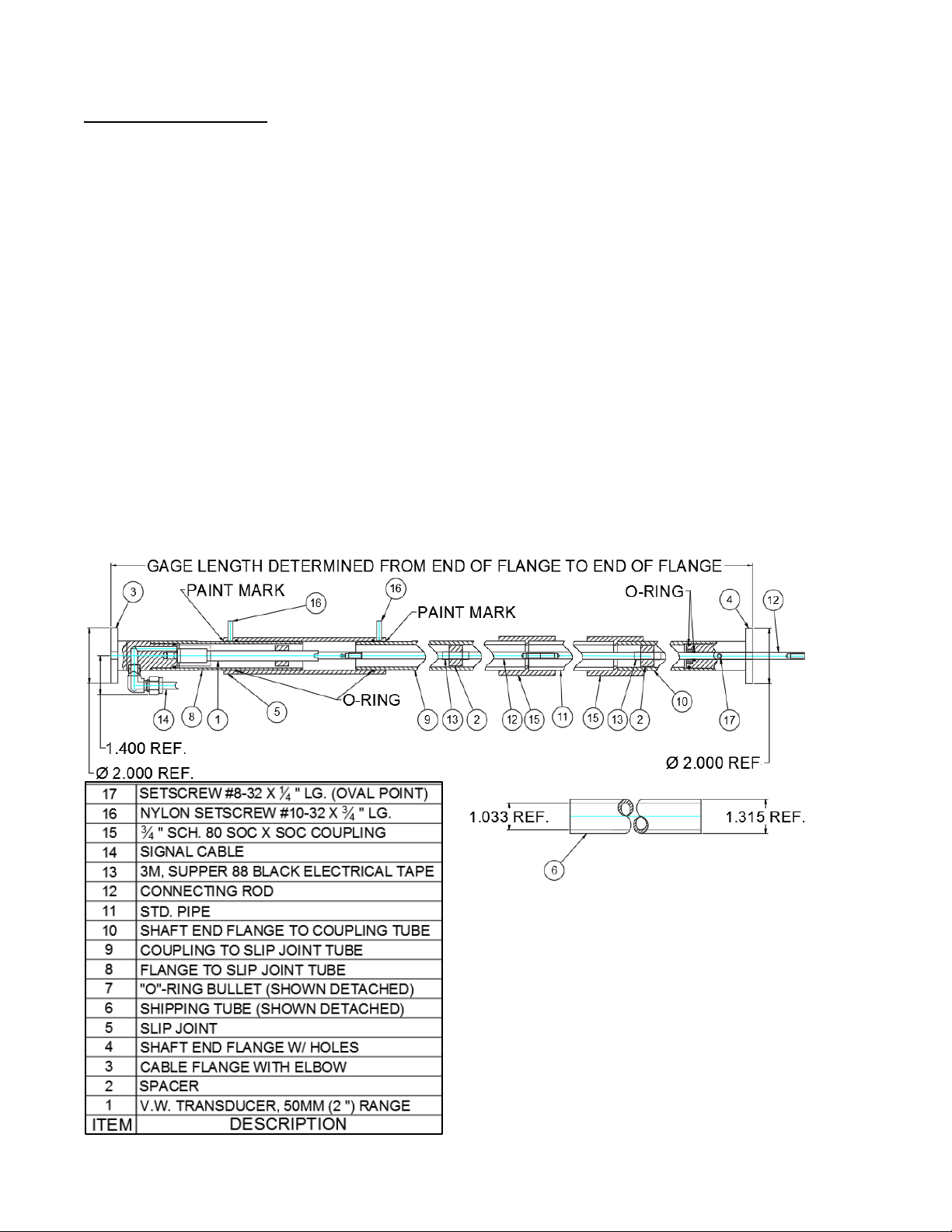
2.2 SENSOR ASSEMBLY ..............................................................................................................................................2
2.3 DEFORMATION METER INSTALLATION ................................................................................................................4
2.3.1 Installation in Boreholes.............................................................................................................................4
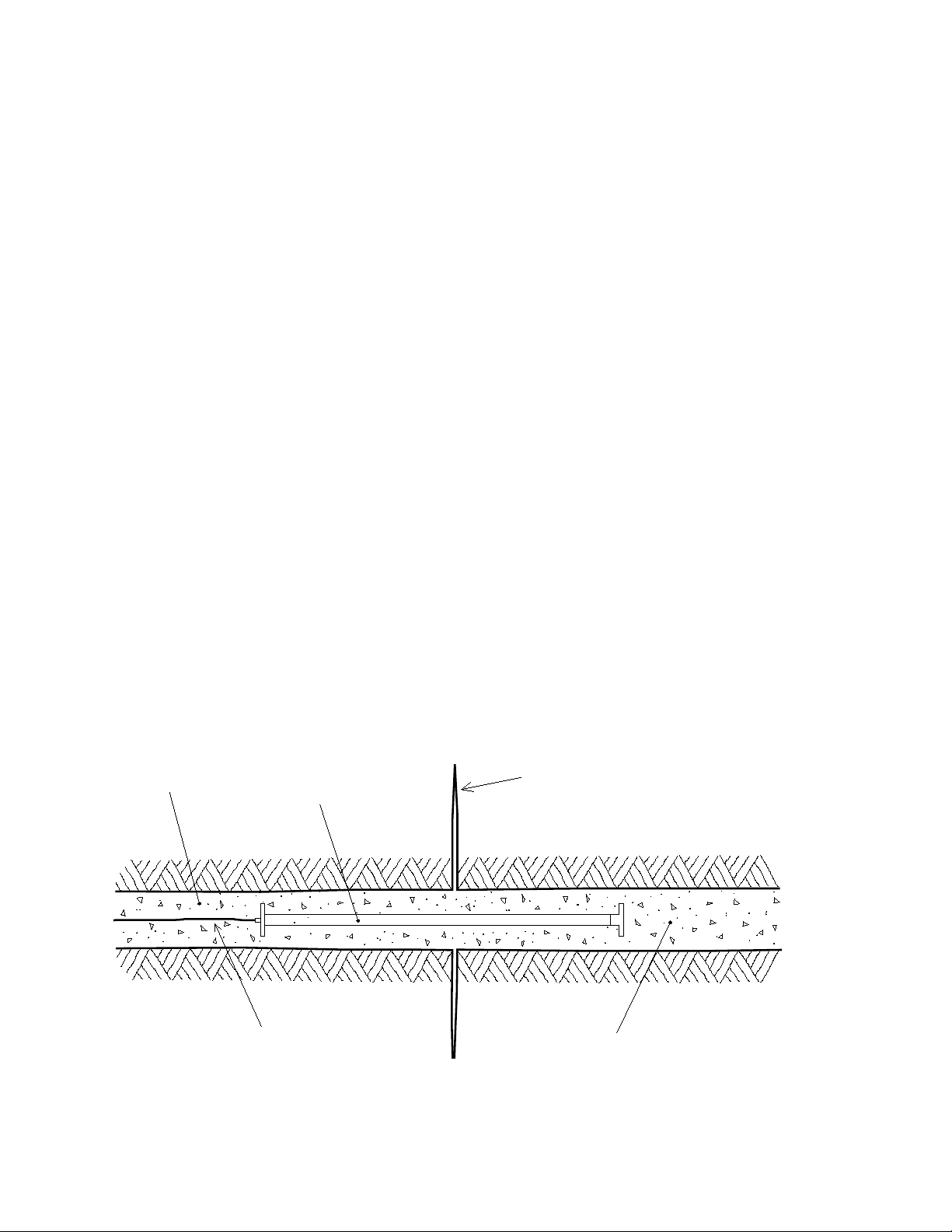
2.3.2 Installation in Mass Concrete .....................................................................................................................5
2.3.3 Installation in Fills and Embankments – Soil Strain Gauges......................................................................5
2.4 CABLE INSTALLATION AND SPLICING ..................................................................................................................6
2.5 INITIAL READINGS ...............................................................................................................................................6
2.6 ELECTRICAL NOISE..............................................................................................................................................6
2.7 LIGHTNING PROTECTION .....................................................................................................................................7
3. TAKING READINGS.............................................................................................................................................8
3.1 GK-404 READOUT BOX.......................................................................................................................................8
3.1.1 Operating the GK-404 ................................................................................................................................8
3.2 GK-405 READOUT BOX.......................................................................................................................................9
3.2.1 Connecting Sensors with 10-pin Bulkhead Connectors Attached ...............................................................9
3.2.2 Connecting Sensors with Bare Leads..........................................................................................................9
3.2.3 Operating the GK-405 ................................................................................................................................9
3.3 GK-403 READOUT BOX (OBSOLETE MODEL)....................................................................................................10
3.3.1 Connecting Sensors with 10-pin Bulkhead Connectors Attached .............................................................10
3.3.2 Connecting Sensors with Bare Leads........................................................................................................10
3.3.3 Operating the GK-403 ..............................................................................................................................10
3.4 MEASURING TEMPERATURES.............................................................................................................................10
4. DATA REDUCTION ............................................................................................................................................11
4.1 DEFORMATION CALCULATION...........................................................................................................................11
4.2 TEMPERATURE CORRECTION .............................................................................................................................13
4.3ENVIRONMENTAL FACTORS ...............................................................................................................................14
5. TROUBLESHOOTING........................................................................................................................................15
APPENDIX A. SPECIFICATIONS.........................................................................................................................17
A.1 MODEL 4430 DEFORMATION METER ................................................................................................................17
A.2 THERMISTOR (SEE APPENDIX BALSO) ..............................................................................................................17
APPENDIX B. THERMISTOR TEMPERATURE DERIVATION.....................................................................18