IV
Contents
Introduction.........................................................................................................................................I
Pictograms and Conventions Used in This Manual..........................................................................I
Positioning of This Document...........................................................................................................II
Revision History................................................................................................................................III
Overview......................................................................................................................................1
Features ................................................................................................................................................ 1
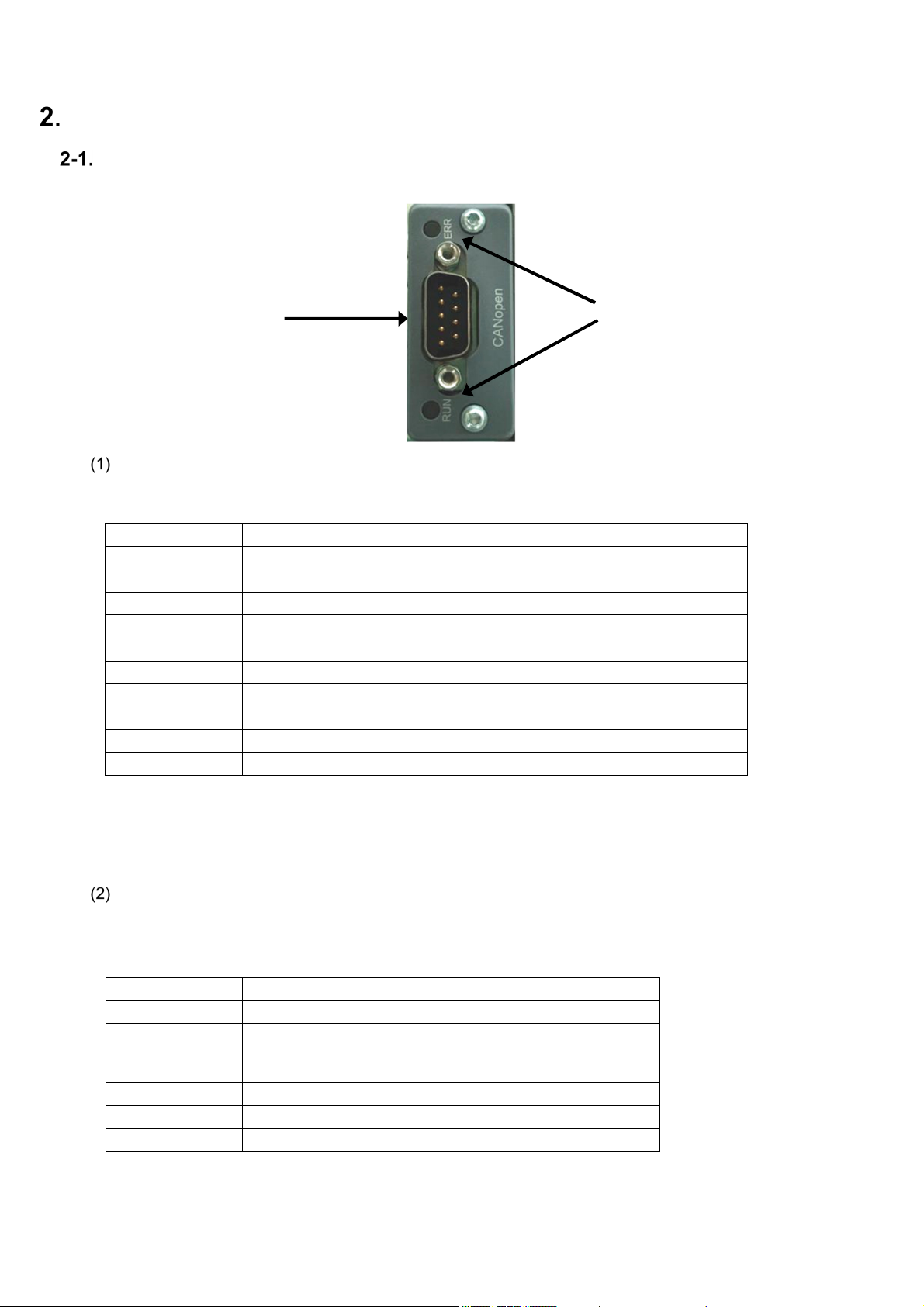
Part Names and Functions .........................................................................................................2
Rear Panel CANopen Interface.............................................................................................................. 2
Connections ................................................................................................................................3
Interface Connector Pin Configuration ................................................................................................... 3
Cable Length ......................................................................................................................................... 3
Wiring precautions ................................................................................................................................. 3
CANopen Communication Settings...........................................................................................4
Switching to Function Mode ................................................................................................................... 4
CANopen Setting Items ......................................................................................................................... 4
Access Sequence........................................................................................................................5
CANopen Object Mapping ..................................................................................................................... 6
Errors...........................................................................................................................................9
Interface Specifications............................................................................................................10
CANopen Interface Specifications ....................................................................................................... 10
Accessories ......................................................................................................................................... 10