C93-M8E - User Guide
UBX-15031067 - R03 Page 3 of 21
Early Production Information
Contents
Document Information................................................................................................................................2
Contents ..........................................................................................................................................................3
1Product description ..............................................................................................................................4
1.1 Overview........................................................................................................................................................4
1.2 C93-M8E package includes ...................................................................................................................... 4
1.3 Evaluation software....................................................................................................................................4
1.4 System requirements ................................................................................................................................ 4
2Specifications .........................................................................................................................................5
3Device description.................................................................................................................................6
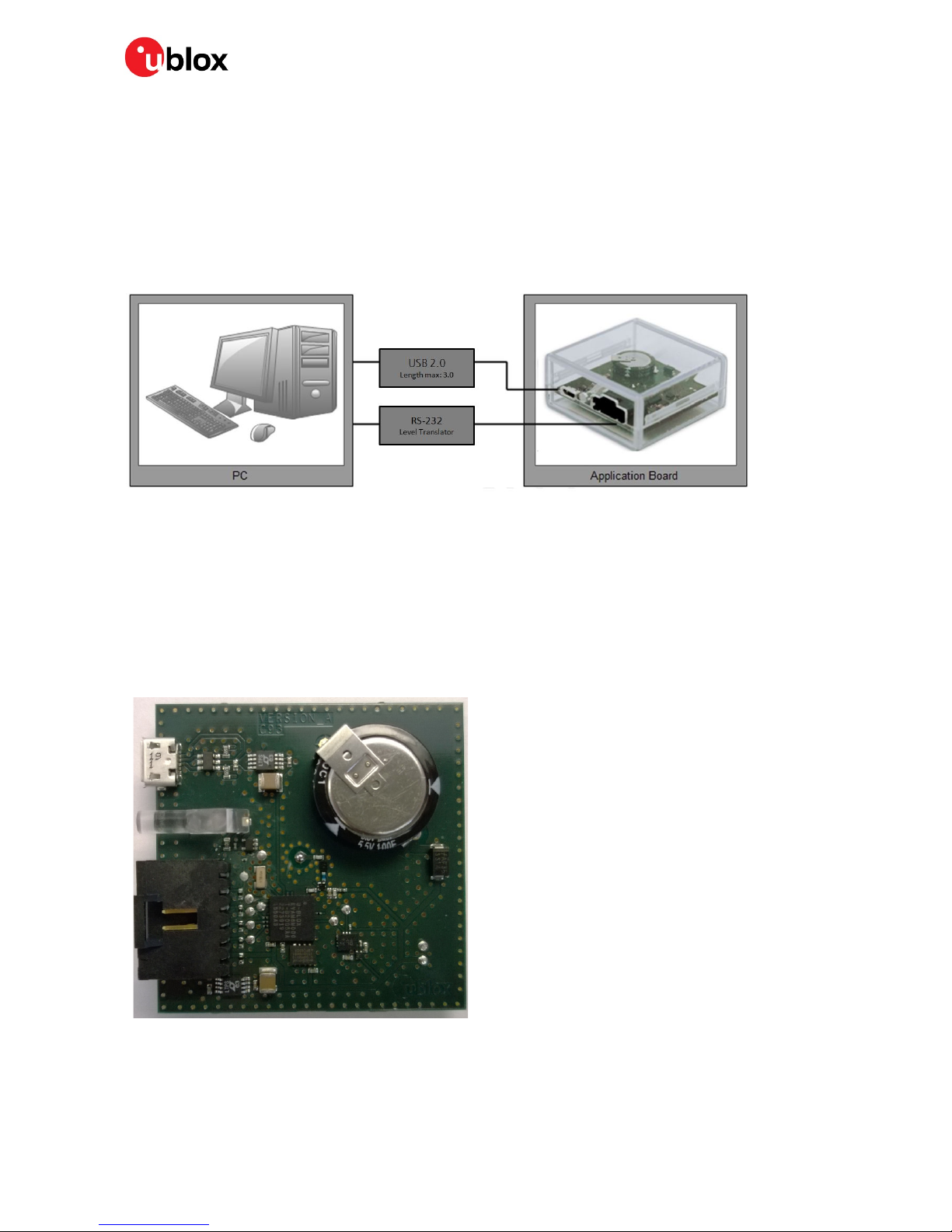
3.1 Interface connection and measurement................................................................................................ 6
3.2 Integrated GNSS antenna.........................................................................................................................6
3.3 Evaluation unit.............................................................................................................................................6
3.3.1 USB ........................................................................................................................................................ 6
3.3.2 Pin header............................................................................................................................................. 7
3.3.3 LED.........................................................................................................................................................7
3.3.4 Backup Battery....................................................................................................................................7
3.3.5 GNSS Configuration........................................................................................................................... 7
4Setting up.................................................................................................................................................8
4.1 C93-M8E installation ................................................................................................................................. 8
4.1.1 Mounting the C93-M8E.....................................................................................................................8
4.1.2 Connecting the cables .......................................................................................................................8
4.2Recommended Configuration ..................................................................................................................9
4.2.1 Serial port default configuration .....................................................................................................9
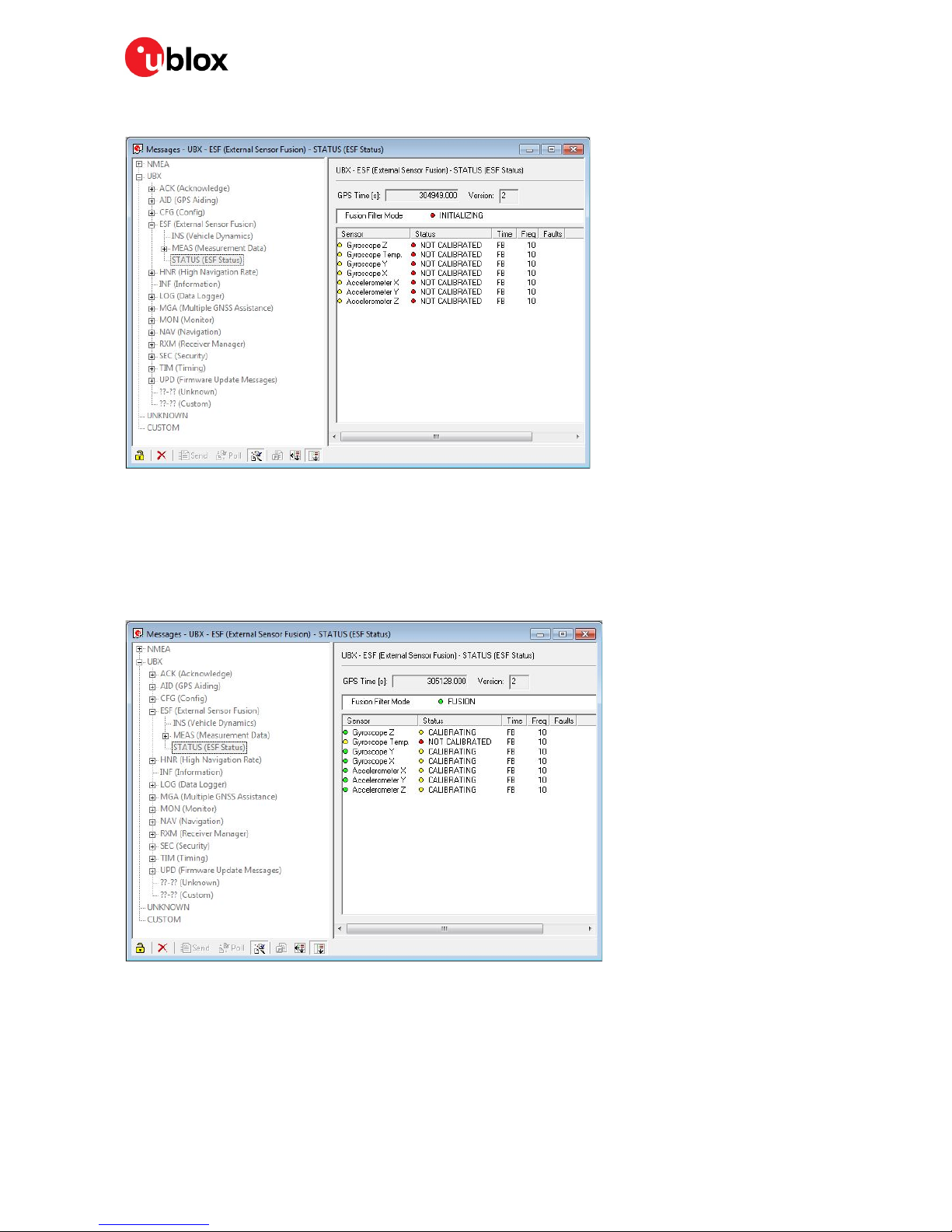
4.2.2 UDR Receiver Operation .................................................................................................................... 9
4.3 Accelerated Initialization and Calibration Procedure ........................................................................11
5Test Drives............................................................................................................................................. 12
6Block diagram ....................................................................................................................................... 13
7Board layout........................................................................................................................................... 14
8Schematic .............................................................................................................................................. 16
9Troubleshooting................................................................................................................................... 17
10 Common evaluation pitfalls ............................................................................................................. 19
Related documents ................................................................................................................................... 20
Revision history.......................................................................................................................................... 20
Contact........................................................................................................................................................... 21