AD104-R2, AD104-R5 7 / 75
ba_aed104_8_e.doc
The AD104 comprises two trigger functions in order to support functions in packaging machines and
checkweigher:
•triggering by means of an adjustable level (gross and net measured value, for both types)
•external triggering by means of a trigger input
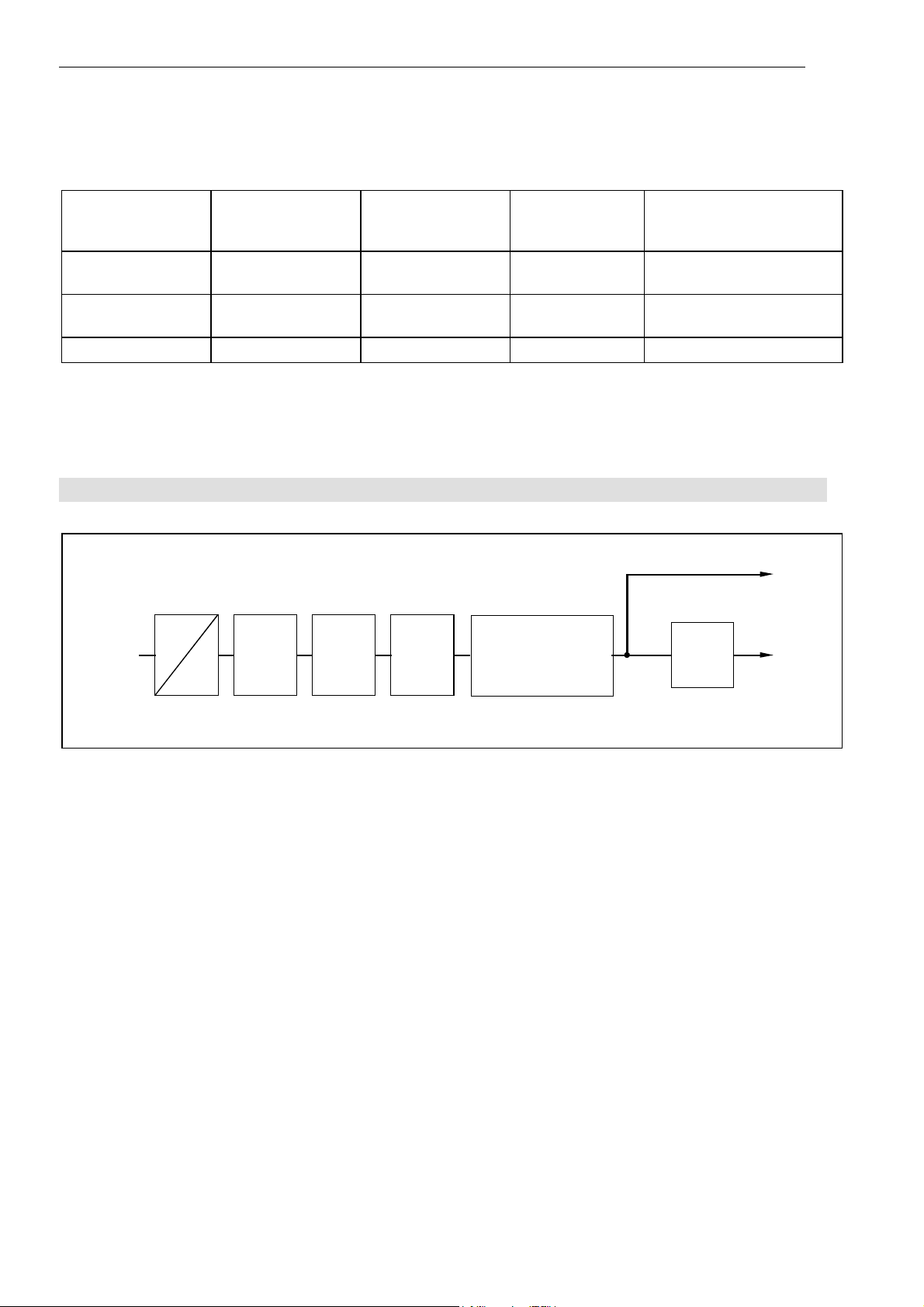
This special measuring mode is activated by means of the command TRC. The measured value determined is
output by means of the command MAV?. For this measuring mode, filter mode FMD1 should be set (fast
settling time).
The measuring speed depends on the preset stop time and the measuring period. The stop time should match
the fast transient recovery of the filter used (ASF).
Level triggering:
This measuring mode is suitable for weighing processes where the scale is relieved in between weighing
events.
The scale is in a no load condition. The material to be weighed will be placed on the scale, the trigger level is
exceeded, and stop time measurement starts. On expiry of this transient period, the actual weight will be
determined; and on expiry of this measuring period, the actual weight value will be stored in memory. The
weighing process can be restarted only once the weight value is again lower than the trigger level (place scale
in no load condition). In this measurement mode, weight determination does not need to be monitored by an
external computer at high speed. The output memory will contain an invalid value until a new measured value
has been created. After retrieving the contents of the measured value memory by means of the MAV?
command, this memory is reset to an invalid condition (invalid value < - 1600 000).
The periods (stop time and measurement period x 10ms at ICR0) and the trigger level can be freely set by
means of the command TRC. The trigger level will be on the user characteristic (NOV).
External trigger:
Both types support an external trigger instead of the limit value trigger. This trigger has a quiescent signal level
at 0V (=low) and uses the low/high edge to activate the measurement process.
The trigger flank starts the stop time measurement. On expiry of this transient period, the actual weight will be
determined over the measurement period, and the averaged actual weight value will be stored in memory. The
output memory will contain an invalid value until a new measured value has been created. After retrieving the
contents of the measured value memory by means of the MAV? command, this memory is reset to an invalid
condition. The periods (stop time and measurement period x 10ms at ICR0) and the trigger level can be freely
set by means of the command TRC. A renewed trigger flank will restart the measurement process. The scale
does not need to be placed into a no load condition.
During a measuring (waiting time + measuring time) a trigger signal is unvalid (no re-triggering). Within this
mode the parameter trigger level (P3) has no function.
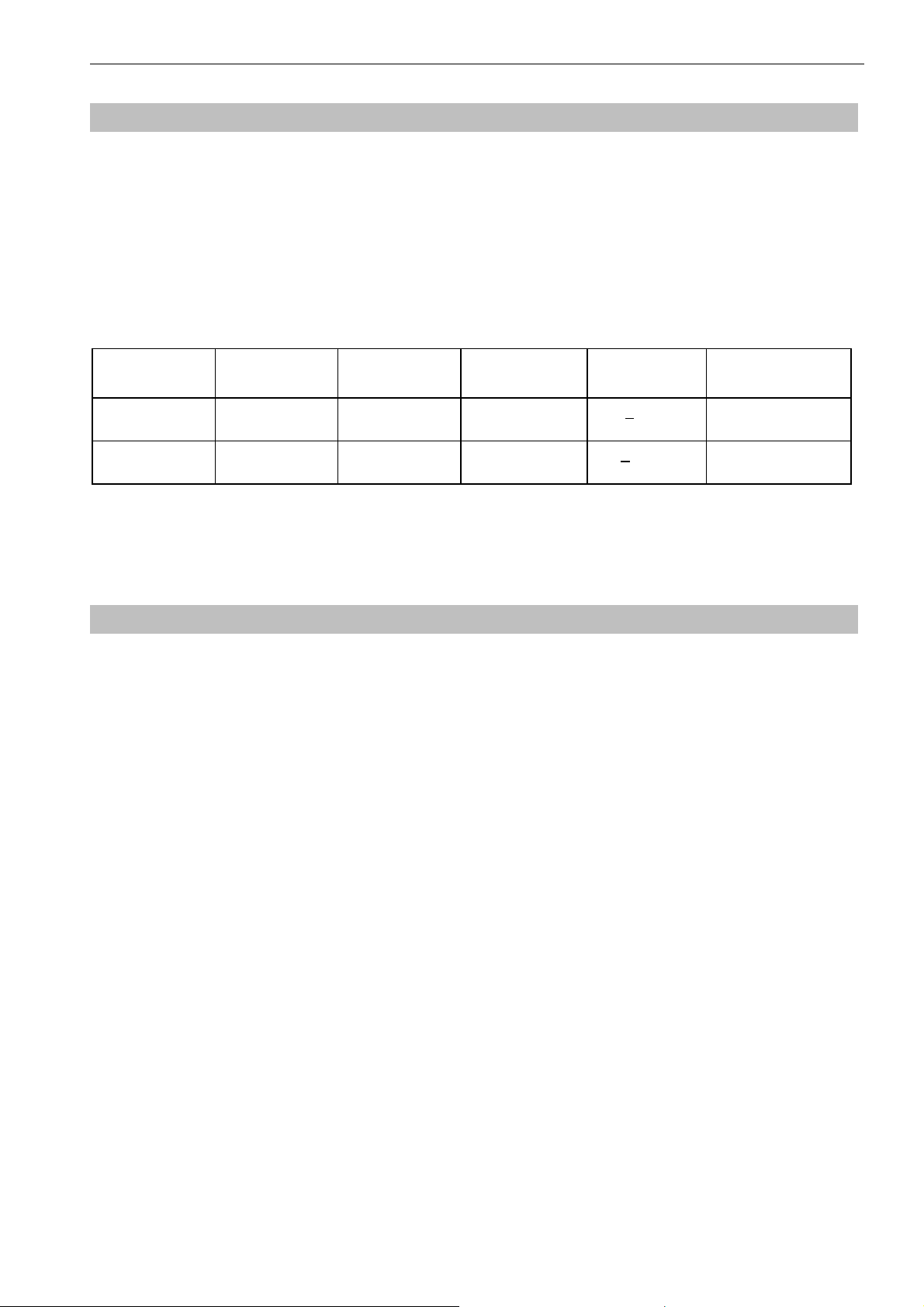
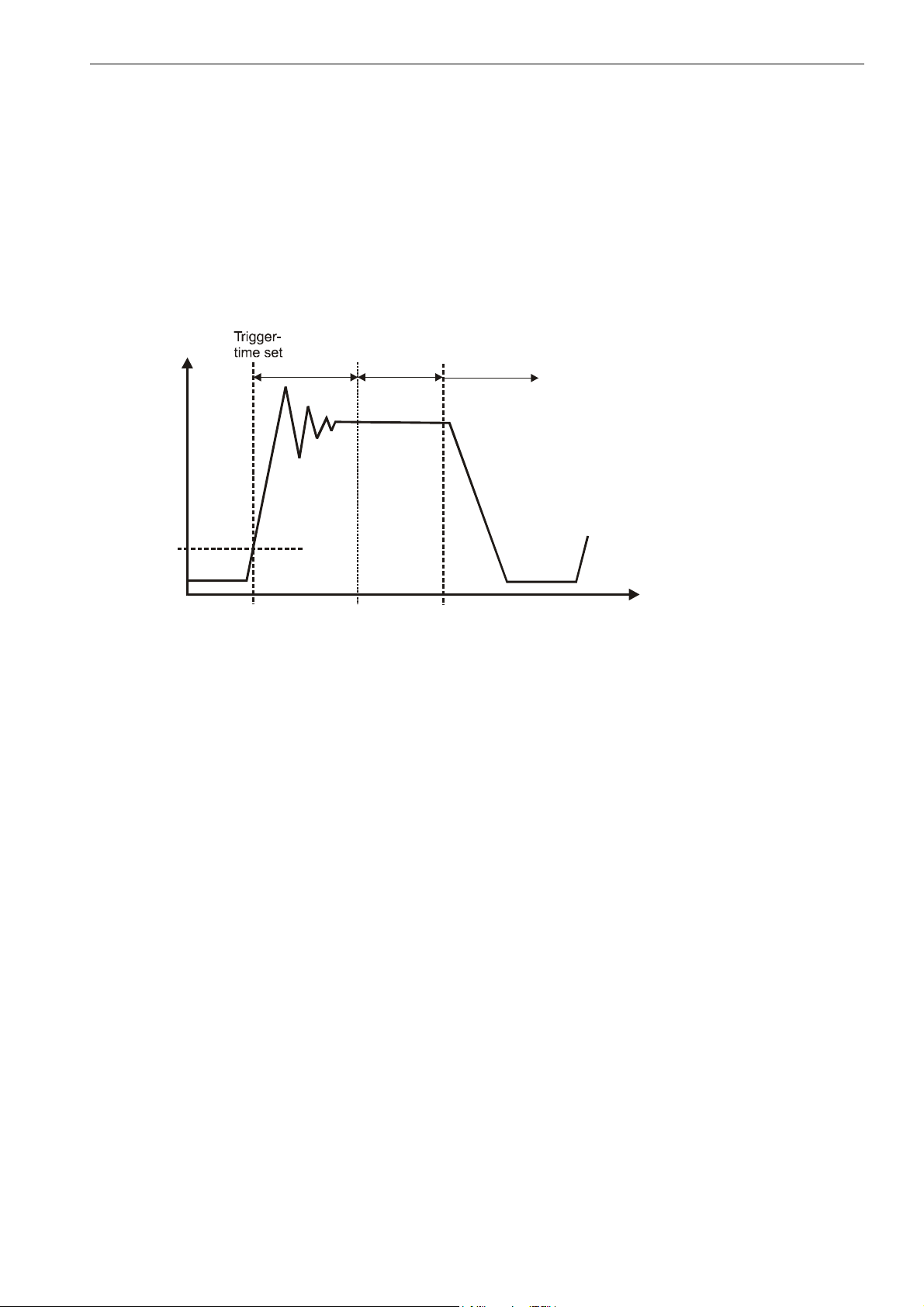
Tr a n s. Re c o v.
time
TRC-command
Parameter 4
Measuring time
TRC-command
Parameter 5
Weig ht
Time
Triggering
(TRC-Command: Parameter 1=1)
Trigger level
TRC-comm.
Parameter 3
if P2=0
Result in output memory