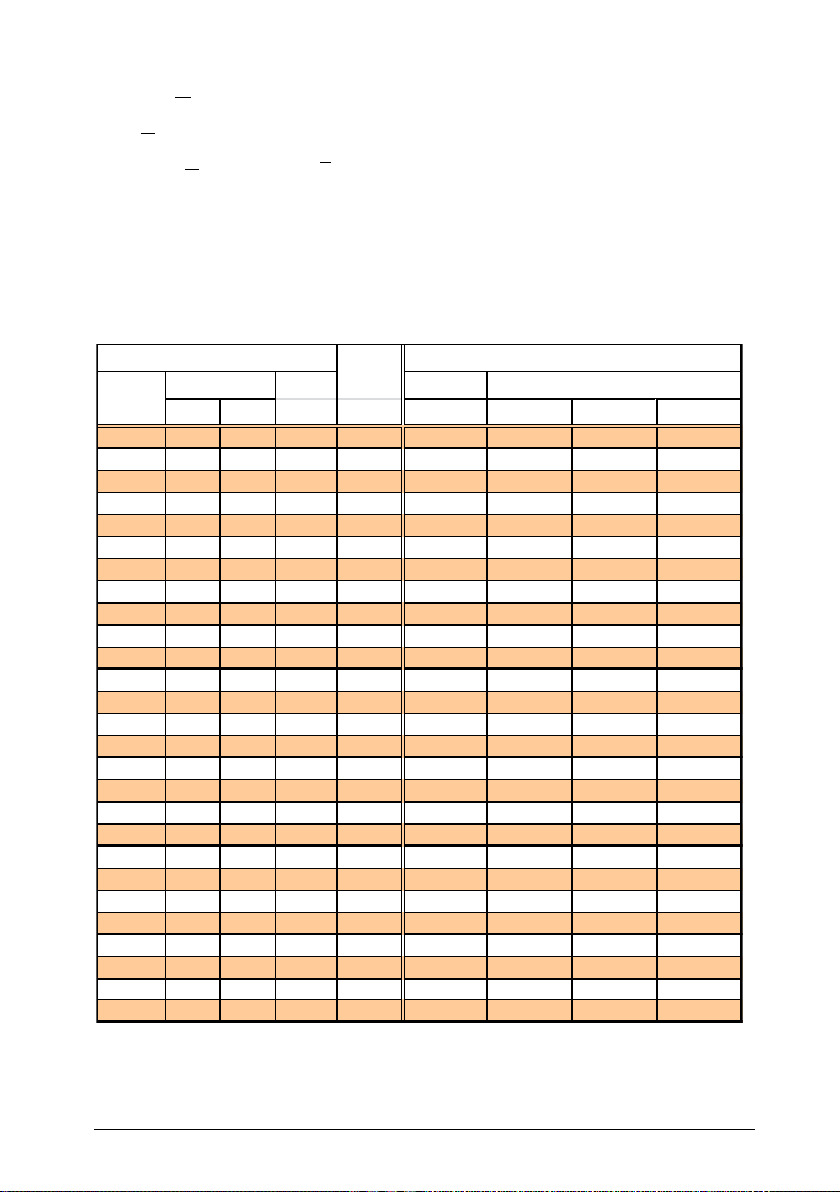
32 32,8 0.796 0.48 6.05 48.4 121
1 1/4 36,3 0.770 0.57 7.17 57.4 143
40 40 1 1/2 39,3 0.748 0.65 8.17 65.3 163
43,1 0.757 0.80 9.94 79.5 199
45,8 0.763 0.91 11.3 90.5 226
50 50 2 51,2 0.772 1.14 14.3 114 286
57,5 0.777 1.45 18.2 145 363
65 65 2 1/2 70,3 0.786 2.20 27.5 220 549
76,1 0.792 2.59 32.4 259 648
80 80 3 82,5 0.797 3.07 38.3 307 767
100 100 4 100,8 0.804 4.62 57.7 462 1.155
125 125 5 125,0 0.812 7.17 89.7 717 1.794
150 150 6 150,0 0.817 10.4 130 1.040 2.599
180 182,5 0.825 15.5 194 1.554 3.885
200 200 8 206,5 0.829 20.0 250 1.999 4.998
250 10 260,4 0.835 32.0 400 3.202 8.004
300 300 12 309,7 0.840 45.6 570 4.556 11.390
350 14 339,6 0.842 54.9 686 5.491 13.728
400 400 16 389 0.845 72.2 903 7.223 18.058
450 450 18 437 0.847 91.5 1.143 9.147 22.867
500 500 20 486 0.850 114 1.419 11.353 28.383
600 600 24 585 0.854 165 2.066 16.527 41.317
700 700 28 684 0.857 227 2.834 22.673 56.683
800 800 32 783 0.859 298 3.723 29.781 74.452
900 900 36 882 0.862 379 4.740 37.920 94.800
1000 1000 40 980 0.864 469 5.865 46.923 117.308