Instructions for Use SS 20.261 Page 9
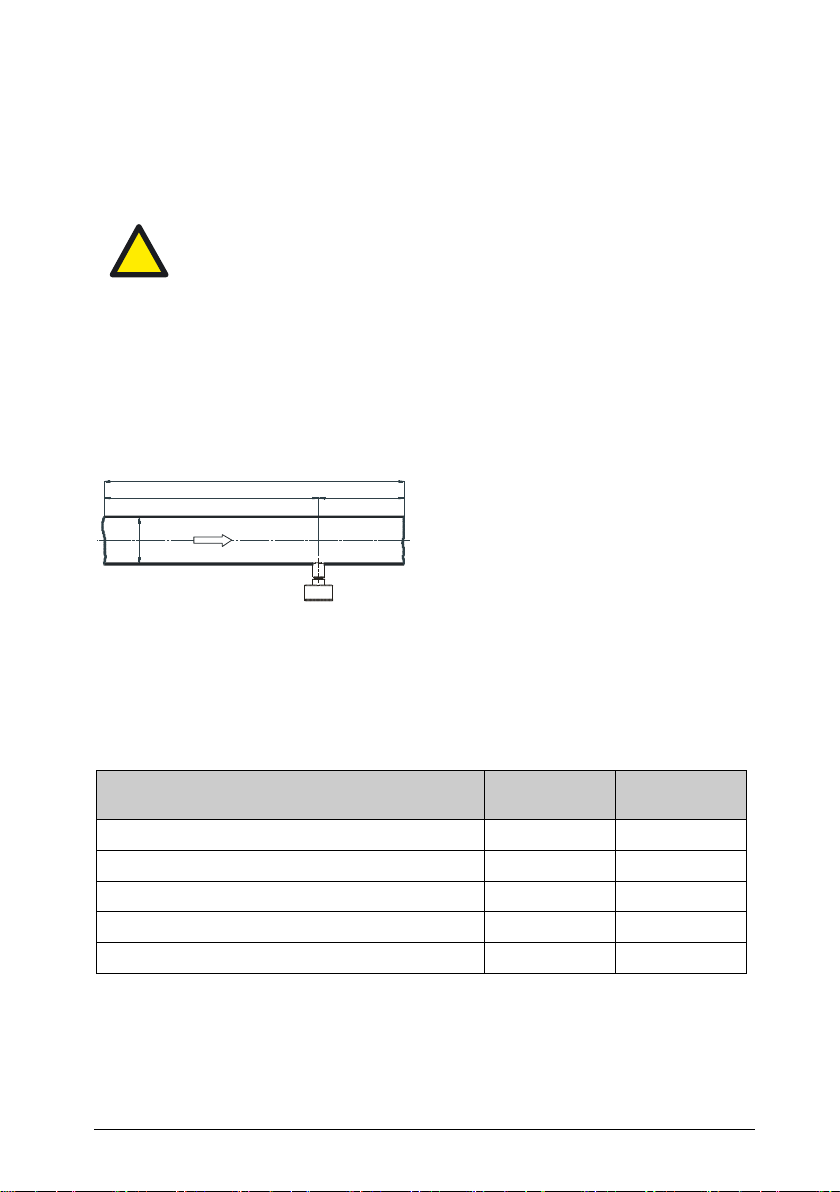
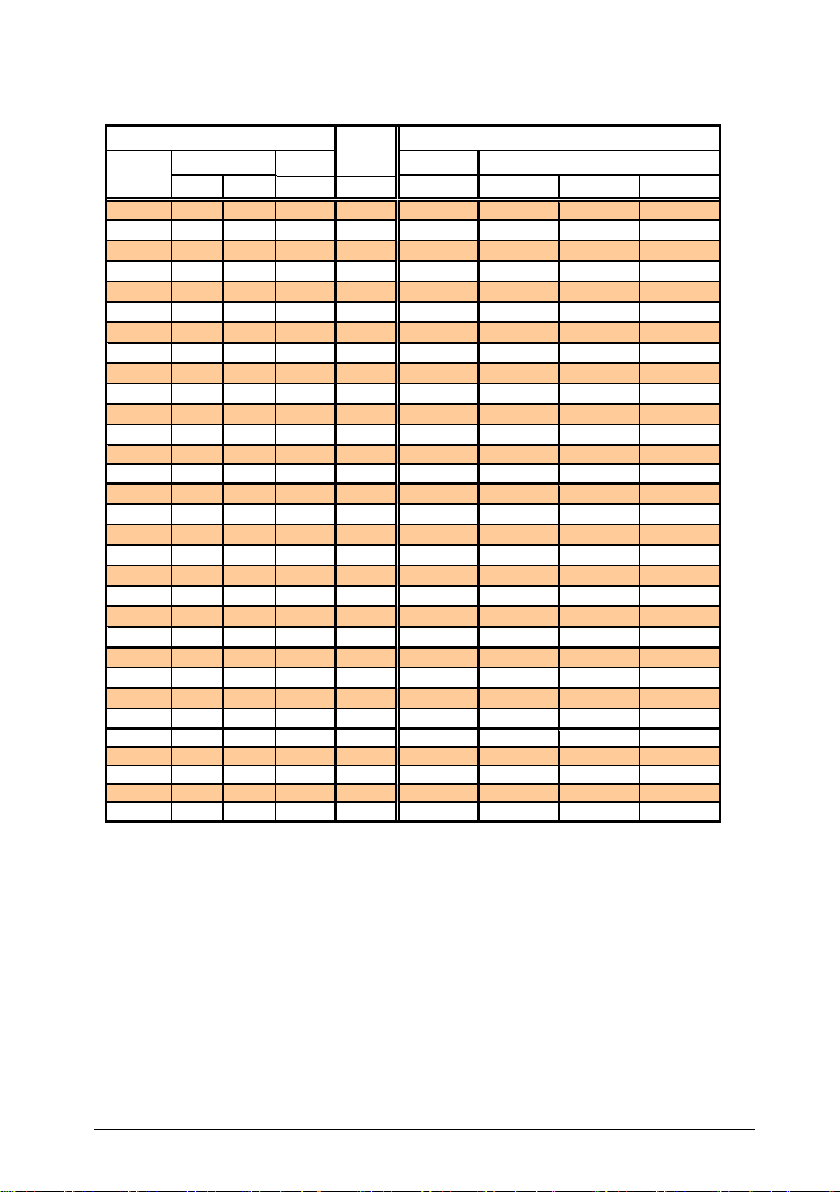
Table 3 lists profile factors and volume flow measuring ranges (with
certain sensor measuring ranges) for standard pipe diameters.
Table 3
[mm] PF 0.2 m/s 40 m/s 60 m/s 90 m/s
25 25 126.0 0.796 0.30 61 91 137
28.5 0.796 0.37 73 110 165
32 32.8 0.796 0.48 97 145 218
1 1/4 36.3 0.770 0.57 115 172 258
40 40 1 1/2 39.3 0.748 0.65 131 196 294
43.1 0.757 0.80 159 239 358
45.8 0.763 0.91 181 272 407
50 50 251.2 0.772 1.14 229 343 515
54.5 0.775 1.30 260 391 586
57.5 0.777 1.45 291 436 654
64.2 0.782 1.82 365 547 820
65 65 2 1/2 70.3 0.786 2.20 439 659 988
76.1 0.792 2.59 519 778 1,167
80 80 382.5 0.797 3.07 614 920 1,380
100 100 4100.8 0.804 4.62 924 1,386 2,079
110 107.1 0.806 5.23 1,046 1,568 2,353
125 125 5125.0 0.812 7.17 1,435 2,152 3,229
130 125 131.7 0.814 7.98 1,597 2,395 3,593
150 150 6150.0 0.817 10.40 2,079 3,119 4,678
160 159.3 0.820 11.77 2,353 3,53 5,295
170 182.5 0.825 15.54 3,108 4,661 6,992
190 190.0 0.826 16.86 3,372 5,059 7,588
200 200 206.5 0.829 19.99 3,998 5,997 8,996
250 260.4 0.835 32.02 6,404 9,605 14,408
300 300 309.7 0.840 45.56 9,112 13,668 20,502
350 339.6 0.842 54.91 10,982 16,474 24,711
400 400 388.8 0.845 72.23 14,446 21,670 32,505
450 450 437.0 0.847 91.47 18,294 27,440 41,161
500 500 486.0 0.850 113.53 22,706 34,059 51,089
550 550 534.0 0.852 137.39 27,477 41,216 61,824
600 600 585.0 0.854 165.27 33,054 49,581 74,371
Diameter of measuring pipe
@ sensor measuring range [m/s]