C850 4 532015 - Rev.B
ENGLISH
Translation of the original instructions
INDEX
1 GENERAL............................................................................................................................................................. 5
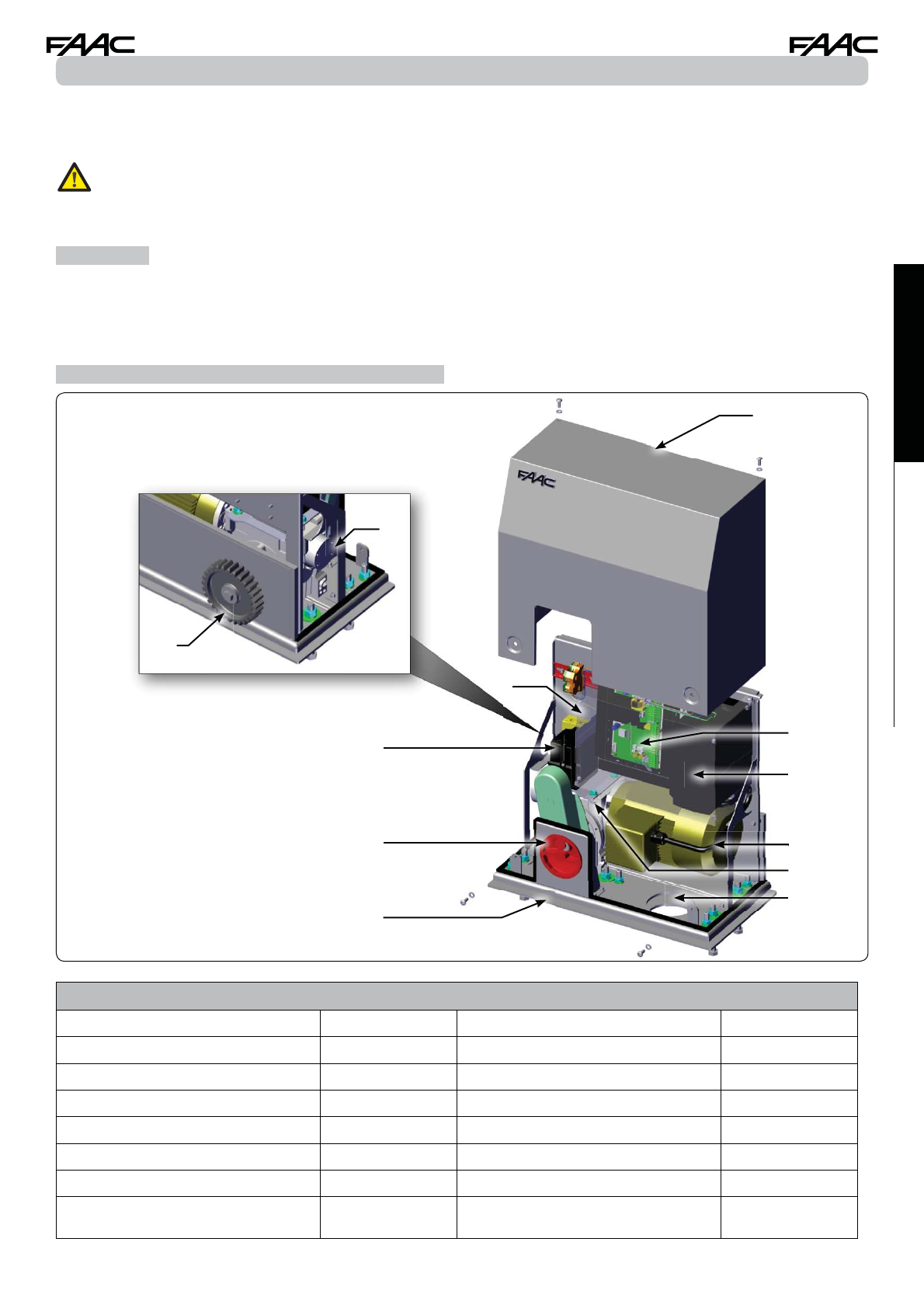
2 DESCRIPTION AND TECHNICAL SPECIFICATIONS ........................................................................................ 5
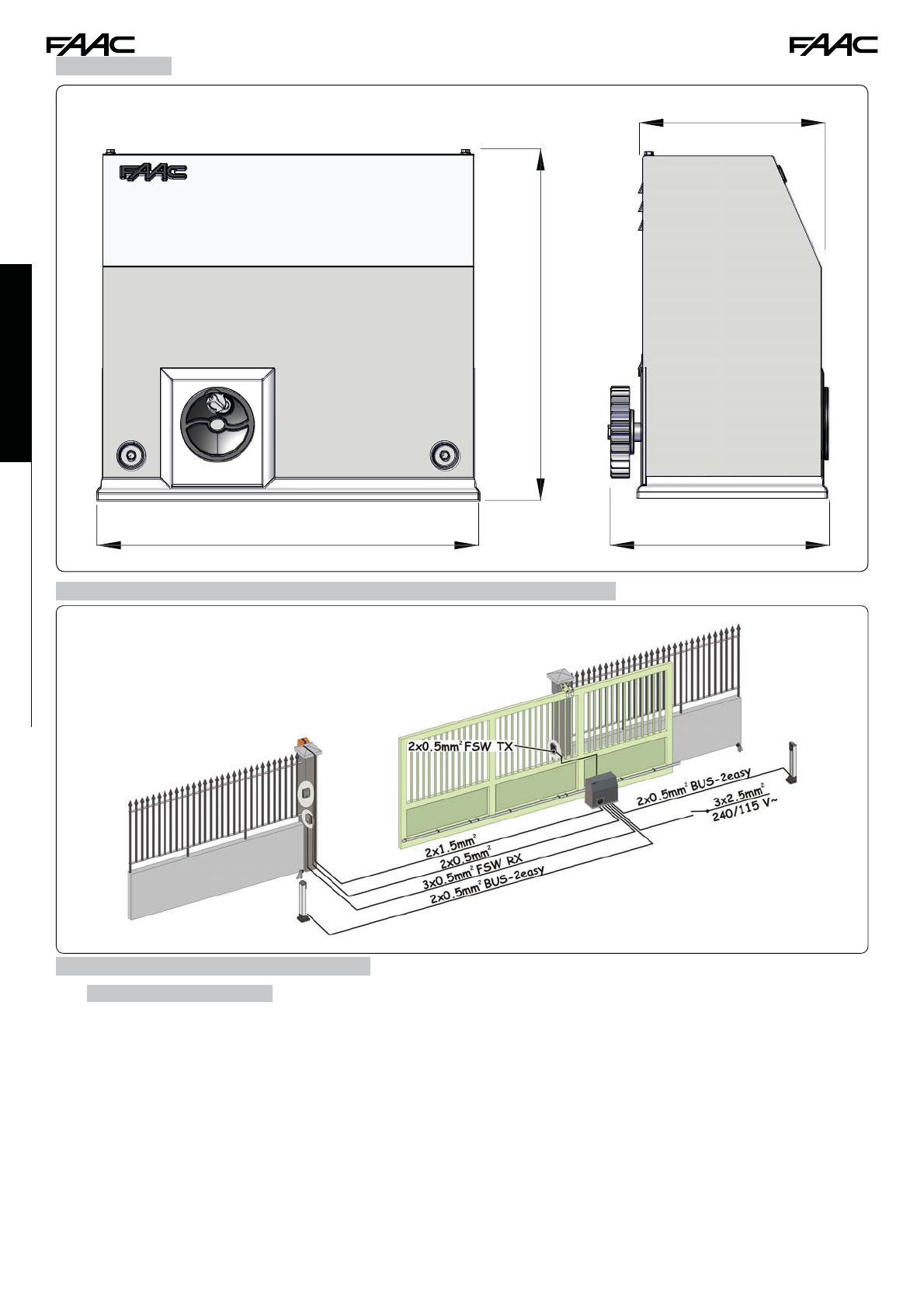
3 DIMENSIONS ....................................................................................................................................................... 6
4 ELECTRICAL PREPARATIONS (standard system with right-hand opening) ................................................ 6
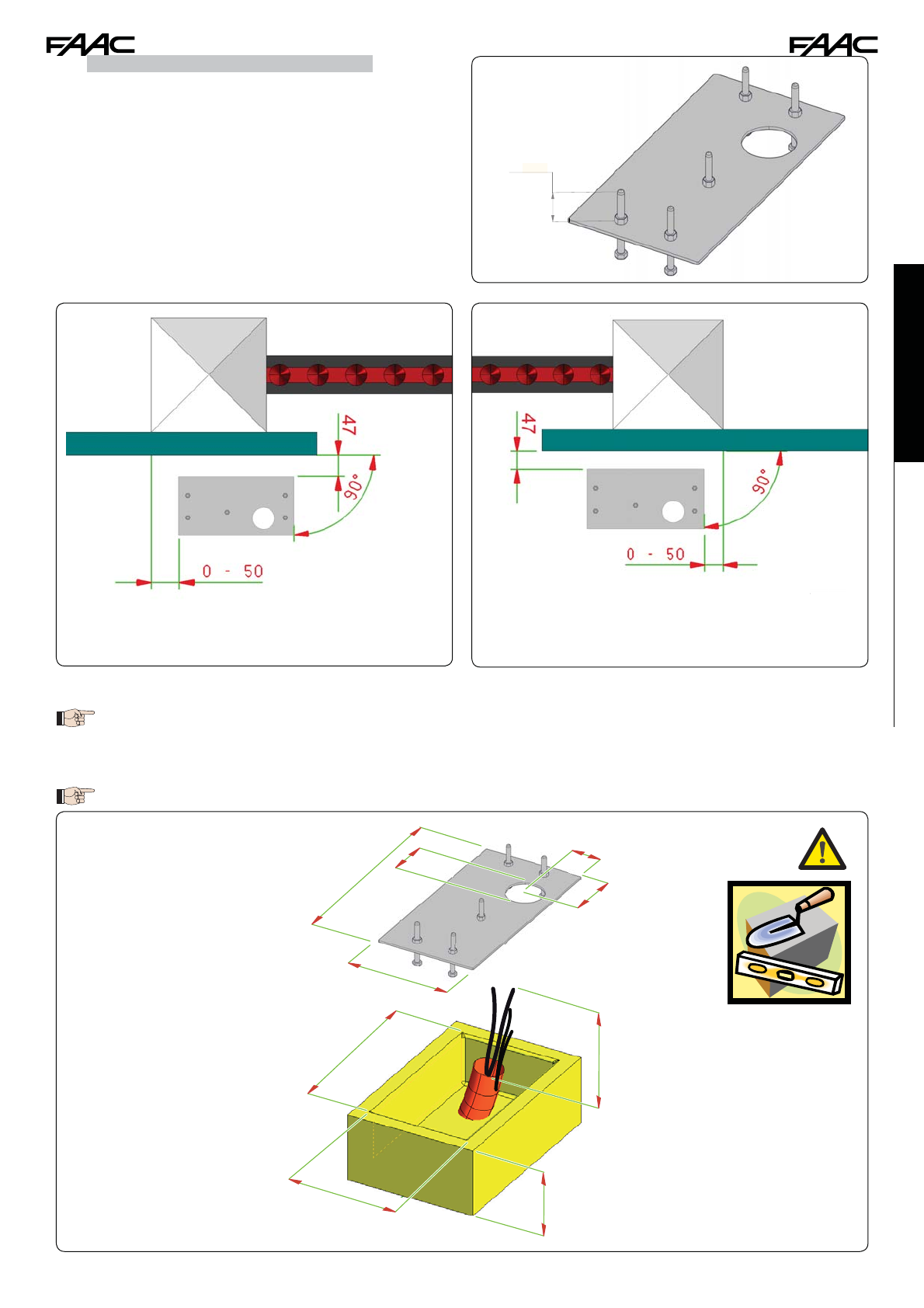
5 INSTALLING THE AUTOMATED SYSTEM ........................................................................................................ 6
5.1 PRELIMINARY CHECKS........................................................................................................................................6
5.2 WALLING IN THE FOUNDATION PLATE ............................................................................................................7
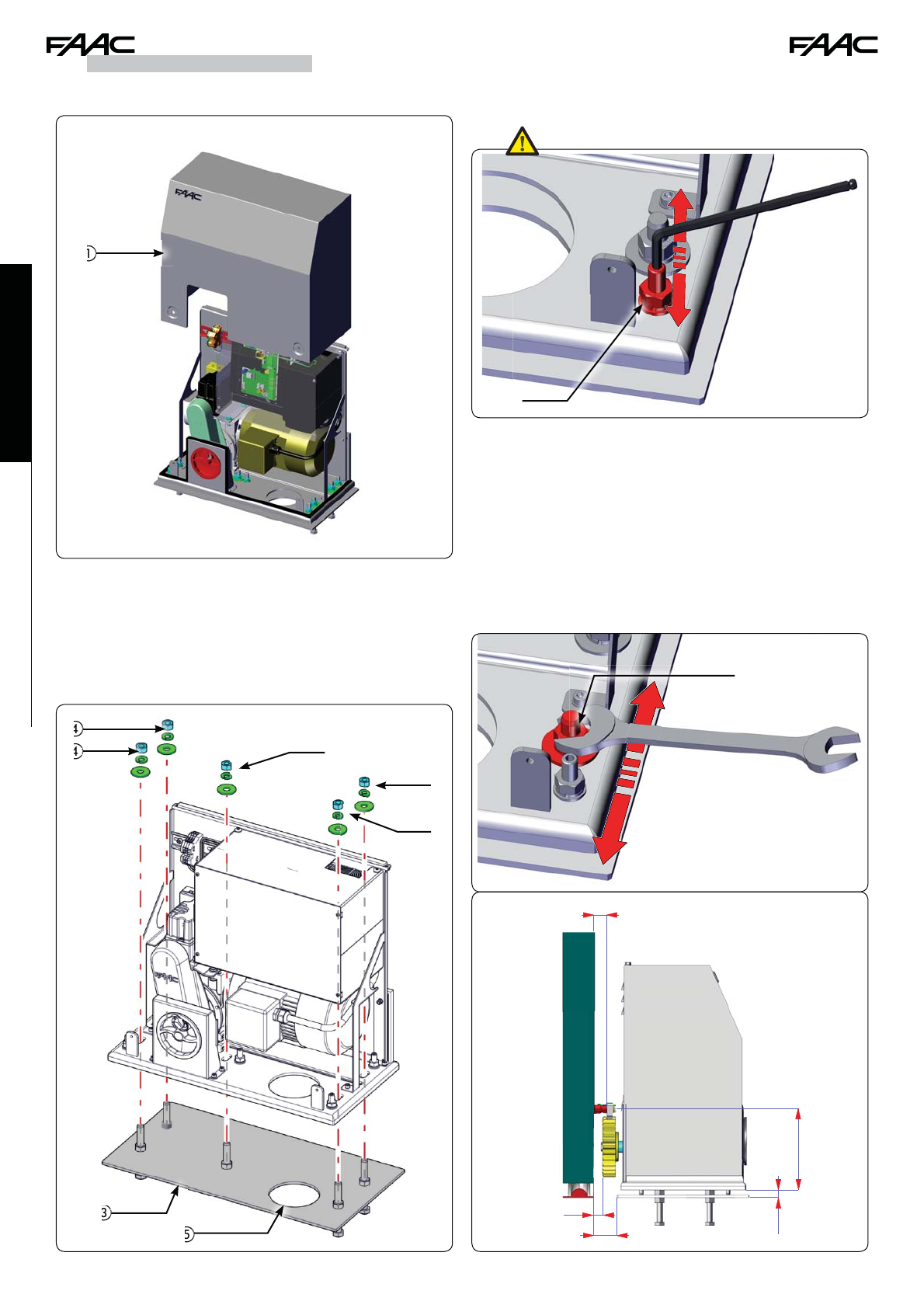
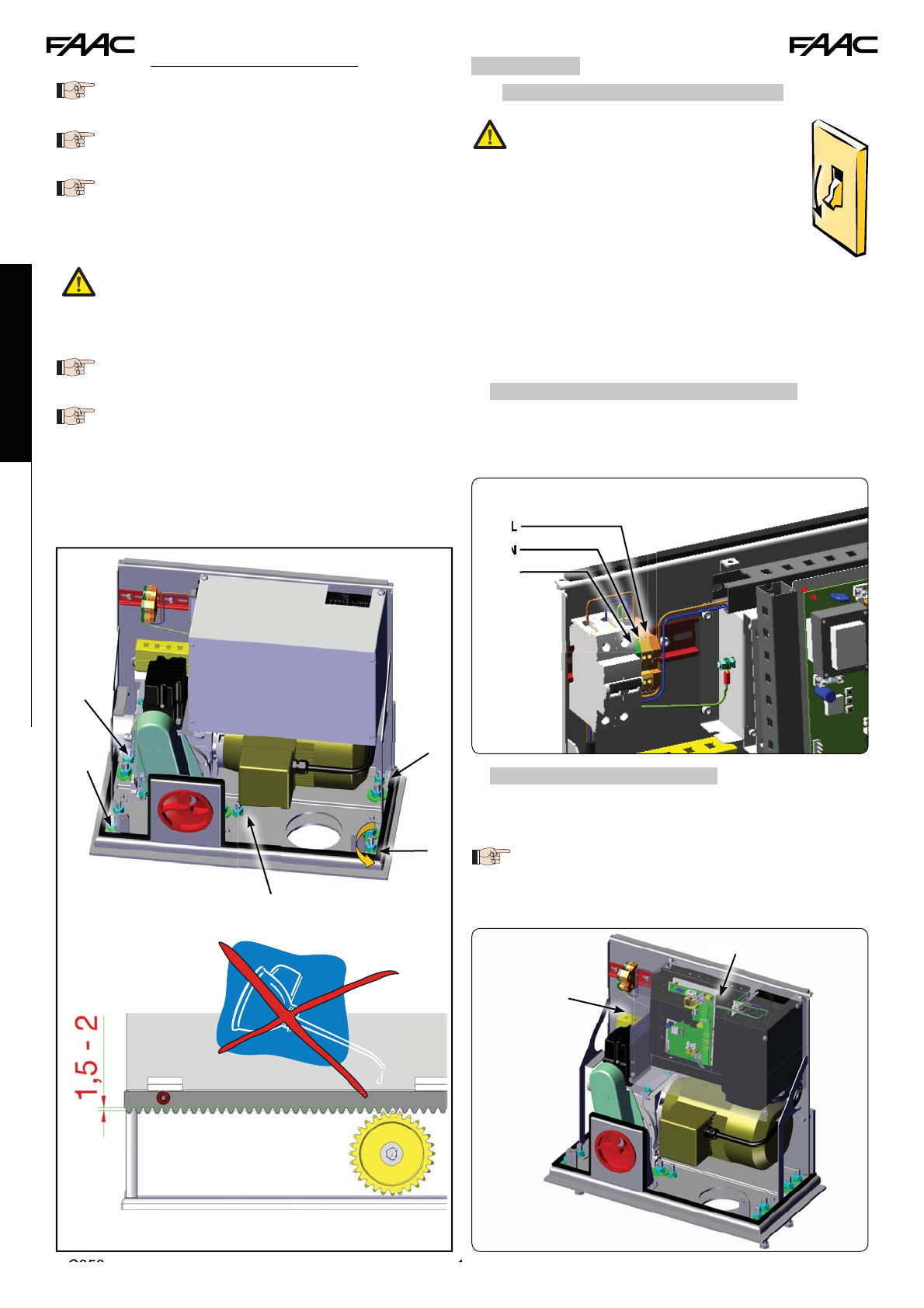
5.3 MECHANICAL INSTALLATION ............................................................................................................................8
5.4 INSTALLING THE RACK .......................................................................................................................................9
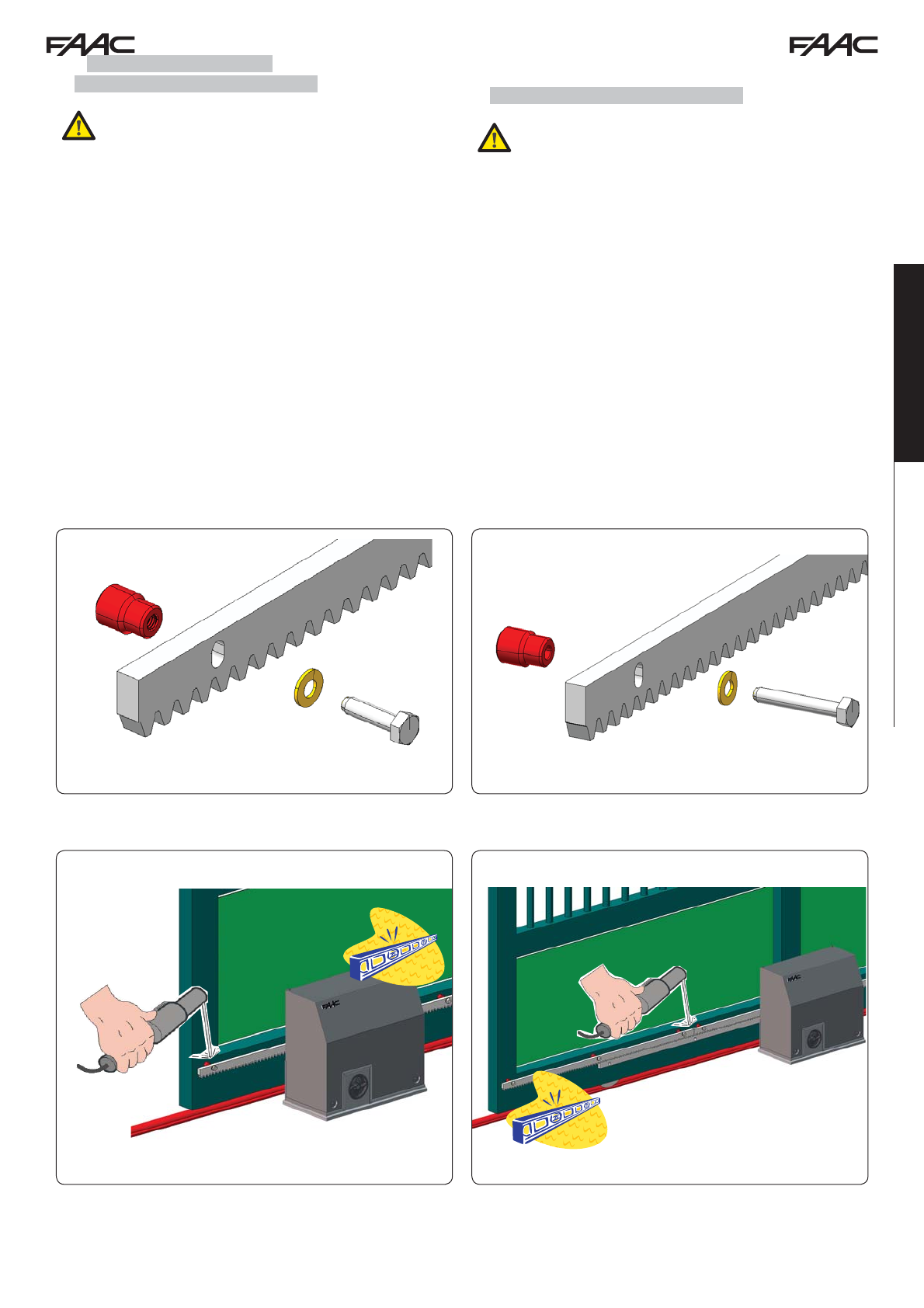
5.4.1 WELD-ON STEEL RACK (Fig. 13)..............................................................................................................................9
5.4.2 SCREW-ON STEEL RACK (Fig. 14) ...........................................................................................................................9
6 OPERATION ...................................................................................................................................................... 10
6.1 CONNECTING THE CONTROL BOARD.............................................................................................................10
6.1.1 CONNECTIONS MADE BY THE INSTALLER...........................................................................................................10
6.1.2 ELECTRONIC CONTROL UNIT ...............................................................................................................................10
6.2 FINAL ADJUSTMENT OF THE LIMIT SWITCHES ............................................................................................11
7 TESTING THE AUTOMATED SYSTEM ............................................................................................................ 13
8 RELEASING/LOCKING THE OPERATOR ....................................................................................................... 13
9 MAINTENANCE ................................................................................................................................................ 13
10 REPAIRS ......................................................................................................................................................... 13
11 E850 ELECTRONIC CONTROL UNIT ............................................................................................................. 14
11.1 WARNINGS ........................................................................................................................................................14
11.2 E850 TECHNICAL SPECIFICATIONS ..............................................................................................................14
11.3 E850 LAYOUT AND COMPONENT DESCRIPTION..........................................................................................14
11.3.1 E850 LAYOUT .........................................................................................................................................................14
11.3.2 E850 COMPONENT DESCRIPTION........................................................................................................................14
11.4 ELECTRICAL CONNECTIONS..........................................................................................................................15
11.4.1 TERMINAL BOARD J1 - ACCESSORIES (FIG. 28)................................................................................................15
11.4.2 PHOTOCELL CONNECTION TO RELAYS AND SAFETY DEVICES WITH “N.C.” CONTACT.............................16
11.4.3 BUS PHOTOCELL CONNECTION ..........................................................................................................................16
11.4.4 TERMINAL BOARD J2, FLASHING LAMP (FIG.28)...............................................................................................17
11.4.5 TERMINAL BOARD J9 - POWER SUPPLY (FIG. 34).............................................................................................17
11.4.6
Connectors J3, J5 - rapid connection opening and closing limit switches ............................................................................................................17
11.4.7 FREQUENCY SELECTOR DS1 (FIG. 27) ...............................................................................................................17
11.4.8 CONNECTOR J4 - MINIDEC, DECODER AND RP CONNECTOR.........................................................................17
11.4.9 REVERSING GATE OPENING CONNECTIONS FROM RIGHT TO LEFT .............................................................17
11.5 PROGRAMMING ...............................................................................................................................................20
11.5.1 BASIC PROGRAMMING LEVEL.............................................................................................................................20
11.5.2 CHANGING THE PRE-SETTINGS...........................................................................................................................21
11.5.3 NEW BUS E850 SIGNAL.........................................................................................................................................21
11.5.4 ADVANCED PROGRAMMING LEVEL ....................................................................................................................22
11.5.5 SETTING THE INTEGRATED LOOP DETECTOR ..................................................................................................23
11.8 EXPERT PROGRAMMING LEVEL ...................................................................................................................24
11.6 E850 BOARD START-UP ...................................................................................................................................24
11.6.1 VERIFYING THE BOARD LEDs..............................................................................................................................24
11.6.2 VERIFYING THE BUS STATUS...............................................................................................................................24
11.7 TESTING THE AUTOMATED SYSTEM..............................................................................................................24
11.8.1. PERSONALISING THE OPERATING LOGIC.........................................................................................................25
1 11.9 OPERATING LOGICS TABLES .....................................................................................................................26
12 OMRON INVERTER CONTROL UNIT............................................................................................................. 28
12.1 DESCRIPTION OF THE INVERTER CONTROL PANEL .................................................................................28
12.2 PROGRAMMING THE INVERTER ...................................................................................................................30
12.3 12.3 INVERTER DEFAULTS .............................................................................................................................31
12.4 INVERTER ERROR............................................................................................................................................33
12.5 OPTIONAL ACCESSORIES...............................................................................................................................34
12.5.1 EXTERNAL PROGRAMMING KEYBOARD.............................................................................................................34