The function is not only error correcting, it also gives
the operator a tool to see the limitations of the nature,
as well as it can give the answer to a range problem.
Wrong sound velocity input gives error in absolute
accuracy, but influences very little in relative position
changes and stability.
At some stage, the ray-bending will cause the ray to
deflect upwards (see figure). In such conditions the
interrogation pulse from the transducer will never reach
the seabed transponder, and thereby no positioning can
take place.
An alternative tool for handling the ray-bending effect,
is to use depth sensing transponders, or entering opera-
tor set transponder depth into the HiPAP / HPR system.
Then the system will use this depth instead of calculat-
ing it.
Signal-to-Noise ratio
The next important factor is the Signal-to-Noise ratio
at the receiving transducer onboard the vessel. This is
often the most noisy place, as it is close to propellers
and thrusters. There are two ways of getting the highest
possible Signal-to-Noise ratio:
1. Suppress the noise as much as possible
2. Increase the transponder source level
Kongsberg Maritime extensively uses beam forming
transducers to obtain maximum sensitivity towards the
seabed transponder. This gives less sensitivity towards
the noise sources (thrusters and propellers) and sup-
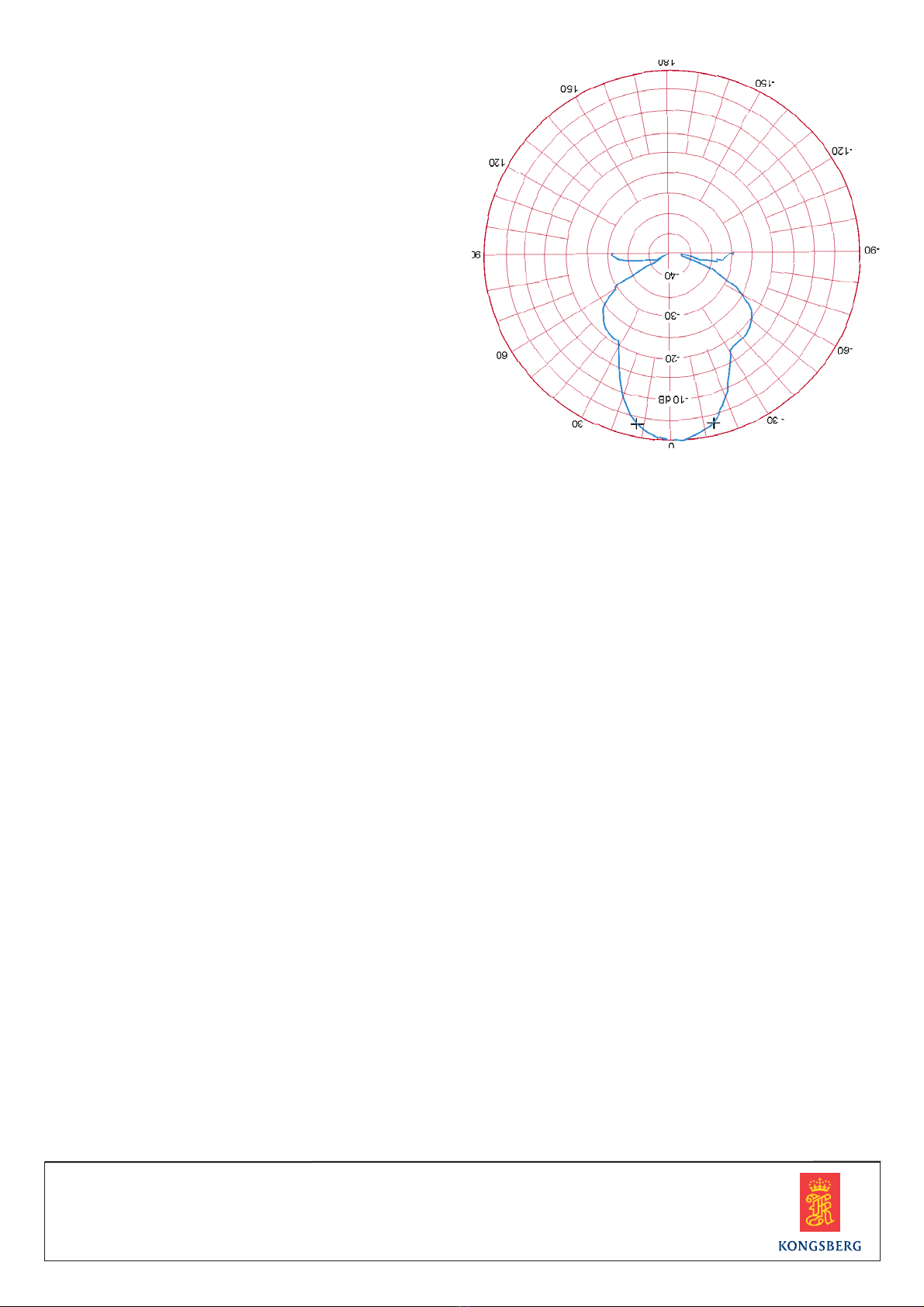
presses the influence from noise. A sensitivity diagram
of a 30 degree transducer beam is shown in the figure
to the right. As you can see, the horizontal sensitivity
(towards the thrusters) is some 30 decibel (dB) lower
than maximum sensitivity vertically!
• The HiPAP system can steer a narrow beam of only
10 degrees to any direction.
• The HPR 400 series of systems has different trans-
ducers - all with directive beams.
Transponder source level
Kongsberg Maritime manufactures many different
types of transponders. It is always important to select
the right transponder for the specific application.
Transponders vary in size, battery lifetime, transmitter
source level and beam pattern. If success is difficult in
for example a noisy environment, you should always
see to that you have a transponder with high source
level to obtain the best Signal-to-Noise ratio. These
transponders are often large due to narrow beamwith
which concentrates the energy in the right direction.
A high power transponder typically has a source level
of 205 dB. A transponder rated for less than 1000 meter
typically has 190 dB. A high power transponder has
approximately 32 times higher source level.
To handle possible noise problems on a plough / tow
fish we suggest to use a responder instead of a trans-
ponder. The responder is triggered and controlled from
the onboard HiPAP / HPR system through an umbili-
cal.
Aerated water
The hull units are designed to allow the transducer to
work some 3,5 meters below the hull. The main reason
to have the transducer at this depth is to get the trans-
ducer down below the “natural” aerated waters sur-
rounding the hull.
The transducer location in the hull is also important.
Kongsberg Maritime will assist to recommend this
location, based on a General Arrangement drawing
showing the entire hull with all propellers and thrust-
ers.
If a Dynamic Positioning (DP) system controls the
engines, it is important that any azimuth thrusters have
“abandoned zones”, to avoid water flushing towards
the transducer(s).
Strandpromenaden 50
P. O . B o x 1 1 1
N-3191 Horten,
Norway
KongsbergMaritimeAS
Telephone: +47 33 02 38 00
Telefax: +47 33 04 47 53
www.kongsberg.com










































