*For additional assistance, please contact Toshiba Adjustable Speed Drive Marketing Dept. at (800) 872-2192
10
Programming
Direct
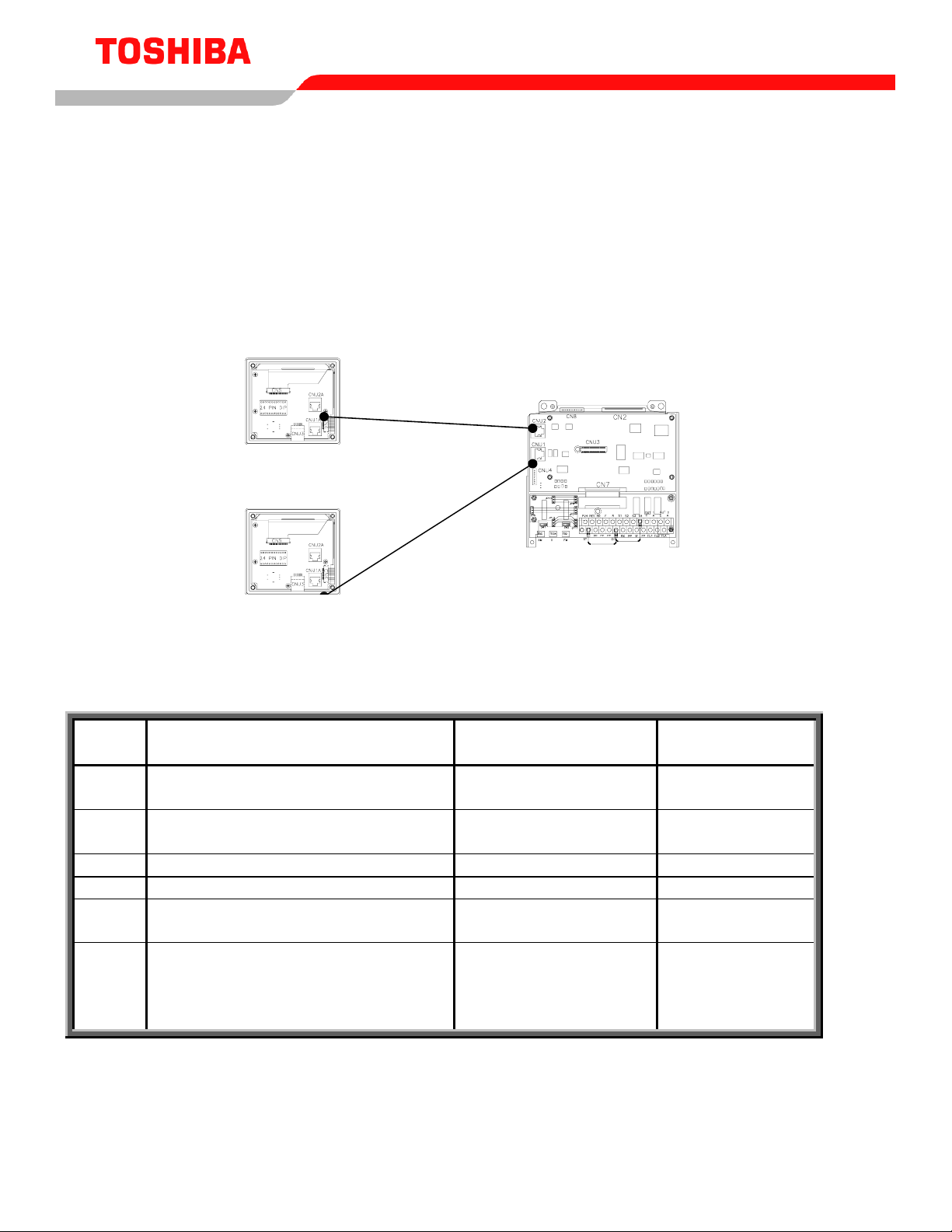
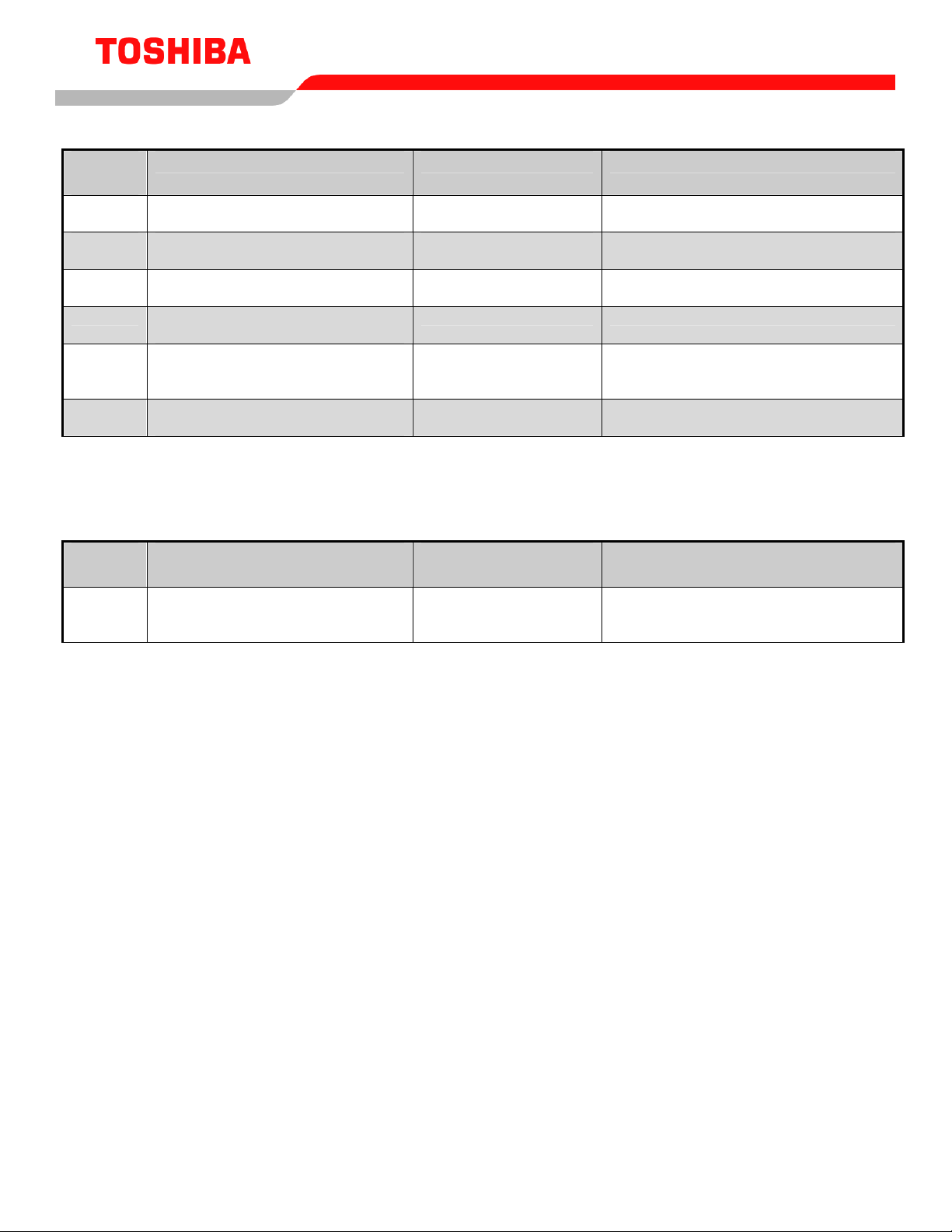
Access Parameter Path Parameter Name Comments
F012 ProgramÎFundamental
ParametersÎFrequency Setting Upper Limit Set to 60
F011 ProgramÎFundamental
ParametersÎFrequency Setting Maximum Frequency Set to 60
F009 ProgramÎFundamental
ParametersÎStandard Mode Selection Accel #1 Set to 5
F010 ProgramÎFundamental
ParametersÎStandard Mode Selection Decel #1 Set to 5
F201 ProgramÎFrequency Setting
ParametersÎSpeed Reference
Setpoints
VI/II Set 0 hz at 20%
Set 60 hz at 100%
F360 ProgramÎFeedback
ParametersÎFeedback Settings Input Selection Set to VI/II for the PID feedback signal
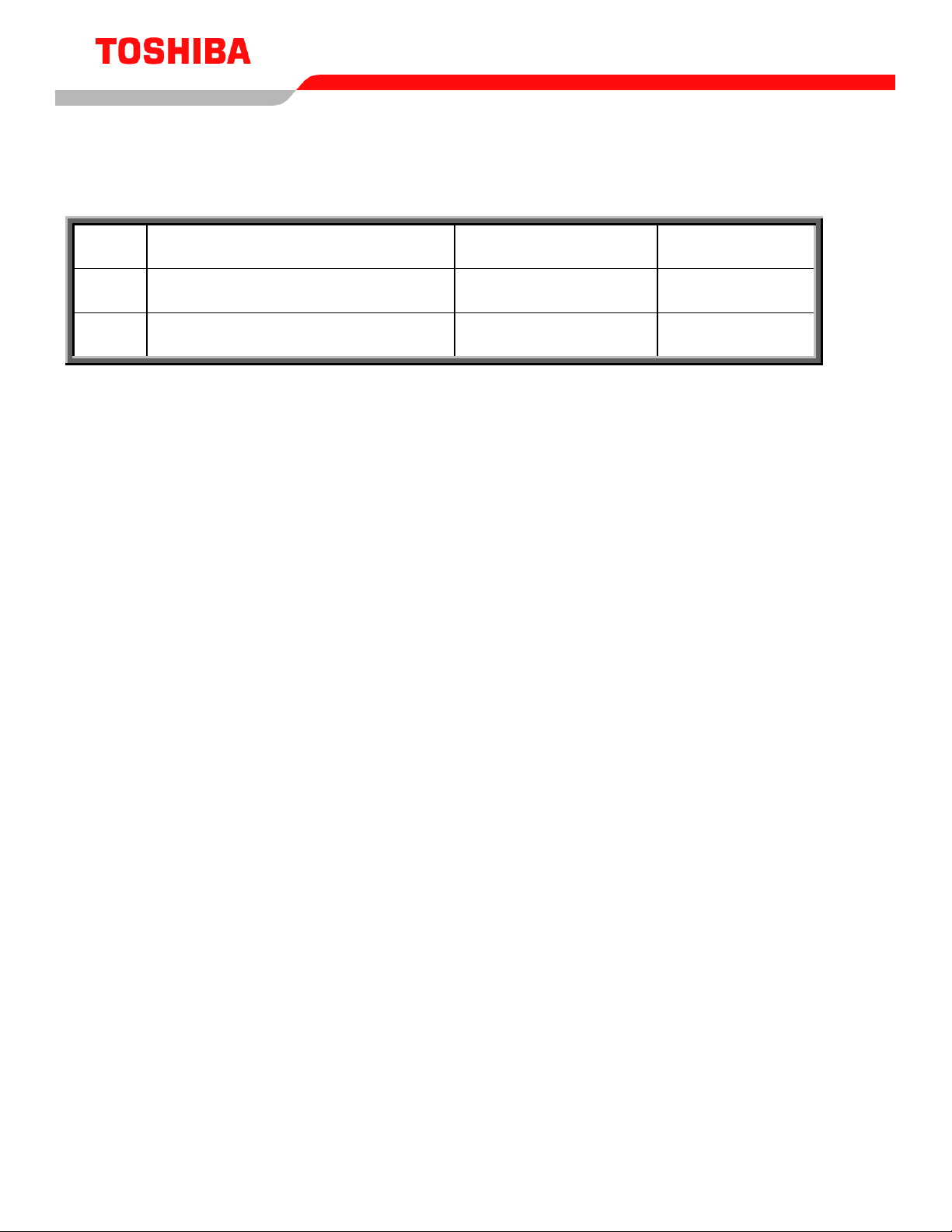
The above programming assumes a system in which an increase in 4-20 mA feedback signal causes
the drive to reduce output frequency. If the system is such that increasing feedback should cause an
increase in output frequency, the ‘II’ terminal should be reversed by programming the following:
Direct
Access Parameter Path Parameter Name Comments
F201 ProgramÎFrequency Setting
ParametersÎSpeed Reference
Setpoints
VI/II Set 60 hz at 20%
Set 0 hz at 100%
Setting the Setpoint
In general, the setpoint is set by adjusting the setpoint to whatever level (frequency) is necessary to
yield the desired process variable setting. The commanded frequency and actual output frequency
will most likely not be the same; it is only the process variable’s (pressure, temperature, etc.) value
that is of concern. It is the ratio of Frequency Command to Maximum Output Frequency that the drive
uses to determine the feedback value it is trying to maintain (the setpoint).
Setpoint via keypad (Local Mode)
Press LOCAL/REMOTE button to illuminate the panel’s green LED. Hit RUN and adjust the keypad
pot to whatever value it takes to develop the desired process variable value. If you still need to setup
the setpoing via the keypad but need to Start/Stop from terminal, then set the F004 Frequency Mode
#1 to Use Common (TTL).
Setpoint via pot on RR terminal (Remote Mode)
Press LOCAL/REMOTE button to turn green LED off. Make F-CC OR R-CC. Adjust RR pot to
whatever setting it takes to generate the desired process variable value.
efesotomasyon.com -Toshiba inverter,drive,servo,plc