Siko WV58MR User manual

373/18
WV58MR
Redundant rotary encoder with CANopen Safety
interface extension
User manual

General Information
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 2 von 25
Inhaltsverzeichnis
1General Information .................................................................................................. 3
1.1 Documentation ........................................................................................... 3
1.2 Definitions................................................................................................. 3
2Intended use............................................................................................................. 3
3Communication via CAN-Bus (CANopen and CANopen Safety)........................................ 4
3.1 Safety data exchange................................................................................... 5
3.1.1 Transfer of safety-relevant data objects (SRDO) .........................................................5
3.1.2 Transmission of Service Data Objects (SDO)...............................................................5
3.1.3 Example for calculating a checksum.........................................................................6
3.1.4 Example of change of a configuration ......................................................................6
3.2 Directory of objects ..................................................................................... 8
3.2.1 Overview of objects ...............................................................................................8
3.2.2 Object description.................................................................................................8
3.2.2.1 1301h: SRDO1 communication parameters.............................................................8
3.2.2.2 1302h: SRDO2 communication parameters...........................................................10
3.2.2.3 1381h: SRDO1 mapping parameters ....................................................................12
3.2.2.4 1382h: SRDO2 mapping parameters ....................................................................14
3.2.2.5 13FEh: Safety configuration ..............................................................................15
3.2.2.6 13FFh: Safety configuration signature (checksum)................................................15
3.2.2.7 6100h: Safety configuration parameters of position..............................................17
3.2.2.8 6101h: Safety configuration parameters of speed .................................................18
3.2.2.9 6120h: Safety position value.............................................................................20
3.2.2.10 6121h: Safety inverted position value ................................................................21
3.2.2.11 6124h: Safety speed value ................................................................................22
3.2.2.12 6125h: Safety inverted speed value....................................................................23
3.2.2.13 61FEh: Safety application configuration..............................................................24
3.2.2.14 61FFh: Safety configuration signature (checksum)................................................24

General Information
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 3 von 25
1General Information
1.1 Documentation
The following documents are associated with this product:
Data sheet; it describes the technical data, the dimensions, the pin assignments, the
accessories and the order key.
Mounting instructions; they describe the mechanical and electrical installation with all
safety-relevant conditions and the associated technical specifications.
User manual ; for commissioning the sensor and integrating it into a fieldbus system.
EDS file (electronic data sheet); this file enables integration and configuration in a
CANopen network by means of commercial CANopen configurators.
These documents can also be found at http://www.siko-global.com/p/wv58mr
1.2 Definitions
Decimal values are given as numbers without addition (e.g. 1234), except when indicated in
direct connection with binary or hexadecimal values, in which case the extension d will be
used (e.g. 1234d). Binary values are identified by adding b (e.g. 1011b) to the figures
whereas hexadecimal values are extended by h (e.g. 280h).
2Intended use
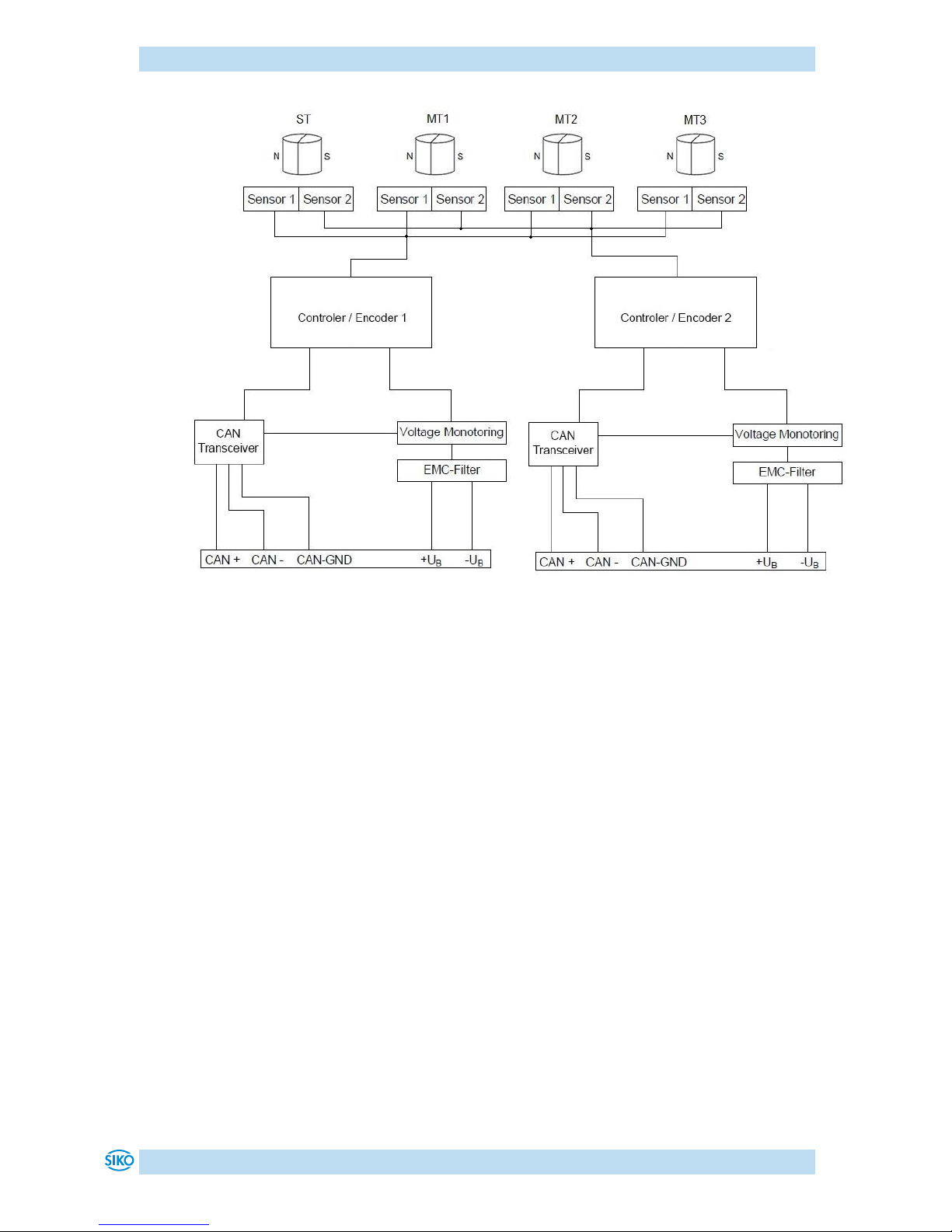
The WV58MR consists of two encoders, which collect redundantly absolute travel information.
By means of the CANopen protocol and CANopen Safety protocol, both encoders can be
configured and read out via the CAN interface. The evaluation and assessment of the data
must occur in the superordinate control unit.
Both encoders are equipped with each 3 LEDs (yellow, red, green), which indicate error or
status information for diagnostic purposes.
The rotary encoder WV58MR is designed for redundant position and speed detection. It can be
used for applications up to Performance Level D (PLd) in the overall system. For this purpose
an overriding safe encoder evaluation device is required. Since the encoder is incapable with
its encoder-internal diagnostic function to initiate actions such as obtaining a safe state on
its own. Increased demands are placed on the electrical and mechanical connection of the
rotary encoder.
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 4 von 25
Fig. 1: Block diagram
3Communication via CAN-Bus (CANopen and CANopen Safety)
The CANopen communication profile CiA DS-301 V4.2, the Device profile for Encoders CiA DS-
406 V4.02 as well as the indicator specification CiA DS-303 Part 3 V1.4.0 for CAN diagnosis
form the basis for the WV58MR. The CANopen Safety protocol EN50325-5 is additionally
implemented for safety-relevant applications.
Safety-relevant applications as well as safety-non-relevant applications can be operated on a
CAN bus.
The WV58MR supports device class C3. The details required for a better understanding of
safety-relevant operation are included in this documentation. If more in-depth information is
required, we recommend reading the applicable technical literature on CANopen Safety. For
fundamental information on CANopen communication refer to the WV58MR CANopen manual.
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 5 von 25
3.1 Safety data exchange
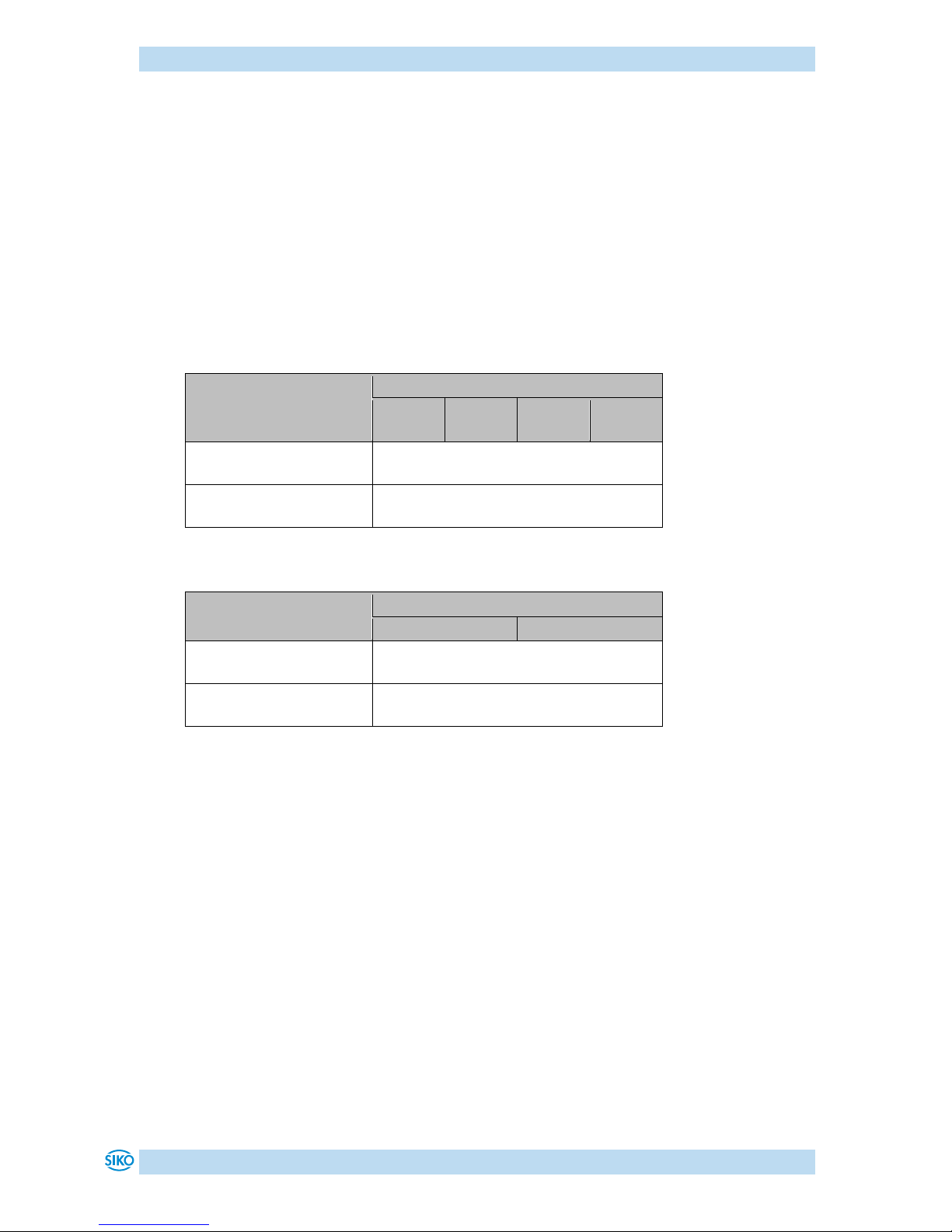
3.1.1 Transfer of safety-relevant data objects (SRDO)
Safety-relevant data objects (SRDO) serve the cyclic exchange of safe data in the Operational
NMT state. An SRDO consists always of 2 messages with different COB-IDs and bit-by-bit
inverted data. A maximum of 8 bytes of user data can be transferred in an SRDO. The WV58MR
supports the Safety Transmit services SRDO1for the position value (4 bytes) and SRDO2 for
speed (2 bytes) according to EN50325-5 and CiA DS-406. The transmit behavior of SRDO is
determined via the objects 1301h, 1381h and 6100h. SRDO is determined via the objects
1302h, 1382h and 6101h. Mapping is static and cannot be changed.
COB-ID
Data in binary code
Byte 0
(LSB)
Byte 1
Byte 2
Byte 3
(MSB)
SRDO1 COB-ID1
000000FFh + 2*Node-ID
Position value
SRDO1 COB-ID2
00000100h + 2*Node-ID
Bit-inverted position value
Table 1: SRDO1 message
COB-ID
Data in binary code
Byte 0 (LSB)
Byte 1
SRDO2 COB-ID1
0000010Fh + 2*Node-ID
speed value
SRDO2 COB-ID1
00000110h + 2*Node-ID
Bit-inverted speed value
Table 2: SRDO2 message
3.1.2 Transmission of Service Data Objects (SDO)
All safety concerning service data objects for device configuration are addressed in expedited
Request/Response
All changes to safety concerning service data objects are monitored via a checksum CRC-16-
CCITT and can only be executed in the Pre-Operational NMT state. The polynomial is g(x) =
x16+x12+x5+1.
Procedure of changing the configuration data in the objects 1301h, 1302h, 6100h and 6101h:
Change values
Enter the new valid checksum (sub-index of the relevant object 13FFh or object 61FFh).
Switch the relevant configuration to valid via object 13FEh or 61FEh.
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 6 von 25
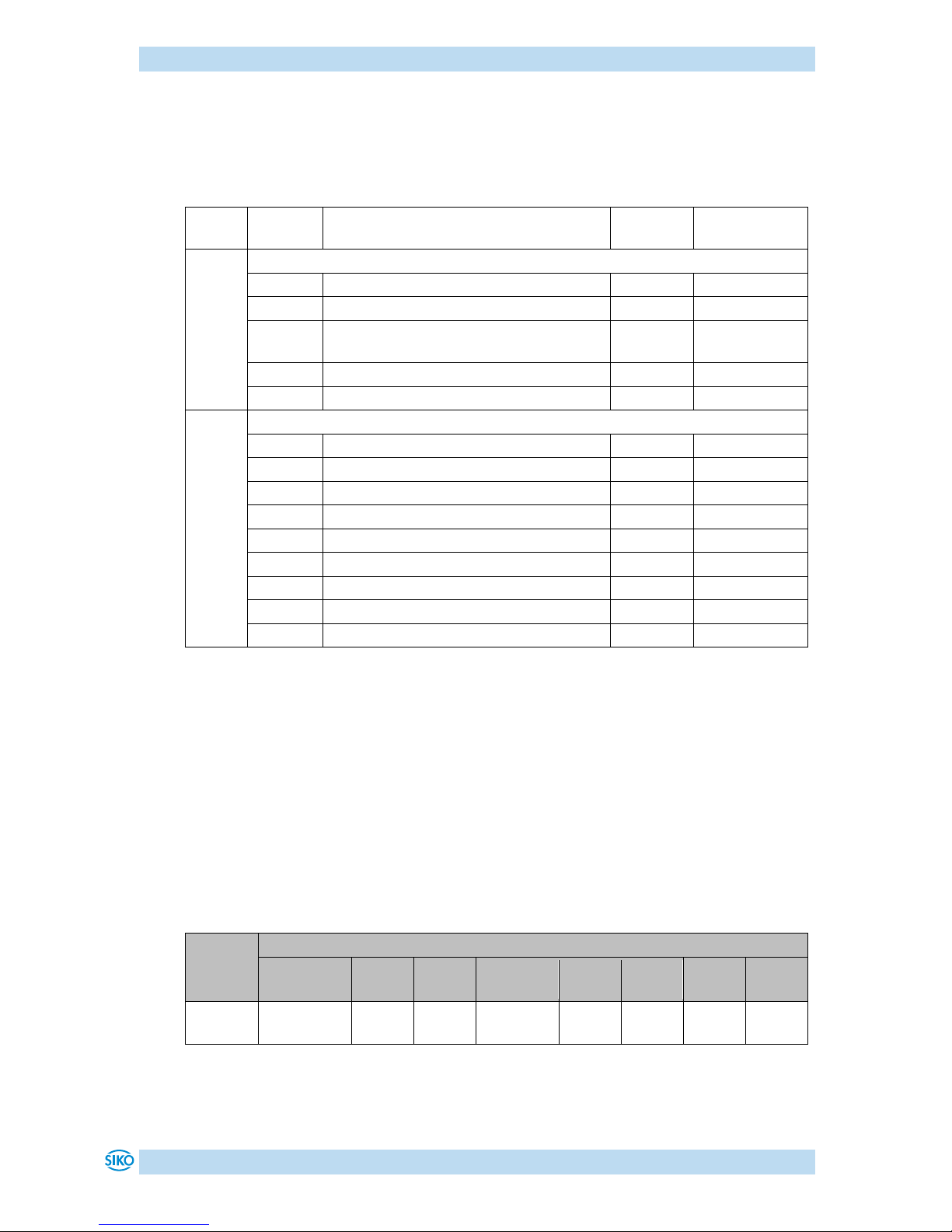
3.1.3 Example for calculating a checksum
In the following example the checksum CRC-16-CCITT (polynomial 1021h) for SRDO2 should be
calculated. The checksum is calculated byte by byte and the low byte by the contents of the
two objects 1302h and 1382h.
Object
Sub-
index
Name
Größe
Data
1302h
SRDO2 Communication parameter
01h
Direction of information
1 Byte
01h
02h
Refresh time
2 Byte
0019h
03h
tx: reserved
rx: SRVT
1 Byte
14h
05h
COB-ID 1
4 Byte
00000111h
06h
COB-ID 2
4 Byte
00000112h
1382h
SRDO2 Mapping Parameter
00h
Highest sub-index
1 Byte
04h
01h
Sub-index
1 Byte
01h
01h
Speed value 1.Byte
4 Byte
61240108h
02h
Sub-index
1 Byte
02h
02h
Inverted speed value 1.Byte
4 Byte
61250108h
03h
Sub-index
1 Byte
03h
03h
Speed value 2.Byte
4 Byte
61240208h
04h
Sub-index
1 Byte
04h
04h
Inverted speed value 2.Byte
4 Byte
61250208h
The following data bytes are used to calculate the checksum:
0x01 0x19 0x00 0x14 0x11 0x01 0x00 0x00 0x12 0x01 0x00 0x00 0x04 0x01 0x08 0x01 0x24
0x61 0x02 0x08 0x01 0x25 0x61 0x03 0x08 0x02 0x24 0x61 0x04 0x08 0x02 0x25 0x61
Checksum = 1C7Fh
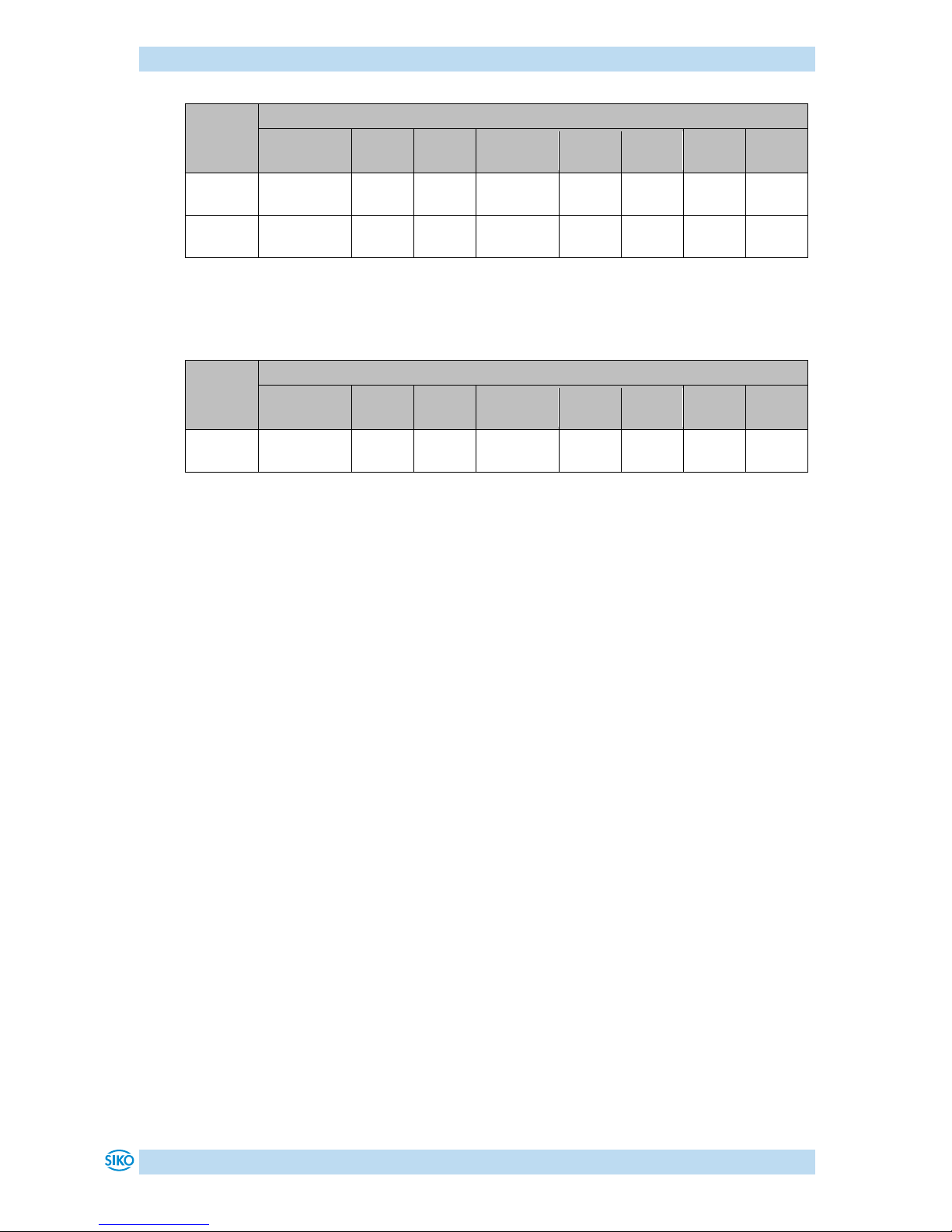
3.1.4 Example of change of a configuration
In the following example, the direction of information is to be changed from valid to invalid
for SRDO2 while maintaining he configuration of SRDO1.
Changing the direction of information:
COB-ID
User data
Command
Index
L
Index
H
Sub-
index
Data 0
Data 1
Data 2
Data 3
600h +
Node-ID
2Fh
02h
13h
01h
00h
-
-
-
For the checksum, the default value 0000h is entered. Therefore, both checksums must be
indicated for the first change even if only one configuration is changed.
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 7 von 25
COB-ID
User data
Command
Index
L
Index
H
Sub-
index
Data 0
Data 1
Data 2
Data 3
600h +
Node-ID
2Bh
FFh
13h
01h
0Dh
25h
-
-
600h +
Node-ID
2Bh
FFh
13h
02h
7Fh
1Ch
-
-
Enable the configuration for SRDO1 and SRDO2. During activation, the configuration is
monitored by means of the checksum in object 13FFh sub-indexes 01h and 02h. The
configurations can only be enabled with the correct checksums.
COB-ID
User data
Command
Index
L
Index
H
Sub-
index
Data 0
Data 1
Data 2
Data 3
600h +
Node-ID
2Fh
FEh
13h
00h
A5h
-
-
-
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 8 von 25
3.2 Directory of objects
3.2.1 Overview of objects
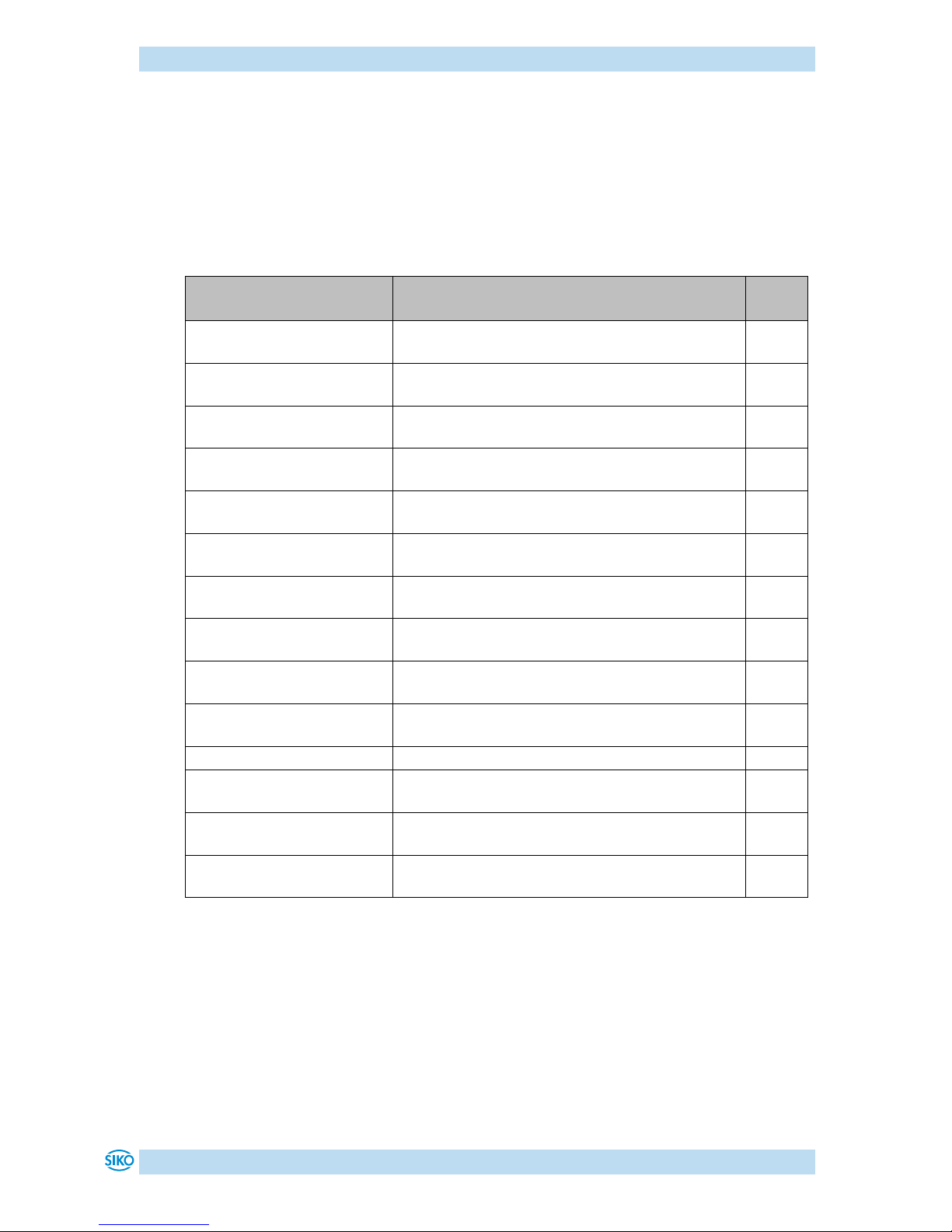
The following table offers an overview of the safety objects of the device.
Name
Description
see
page
1301h: SRDO1
communication parameter
SRDO1 communication parameter
8
1302h: SRDO2
communication parameter
SRDO2 communication parameter
10
1381h: SRDO1 mapping
parameter
SRDO1 transmit mapping parameter
12
1382h: SRDO2 mapping
parameter
SRDO2 transmit mapping parameter
14
13FEh: Safety configuration
Activate the safety configuration for SRDO1 and
SRDO2
15
13FFh: Safety configuration
signature (checksum)
Signatures (checksums) for SDRO1 and SDRO2
configurations
15
6100h: Safety configuration
parameters of position
Safety configuration of the position parameters
17
6101h: Safety configuration
parameters of speed
Safety configuration of the speed parameters
18
6120h: Safety position value
Safety position value (offset with calibration and
offset value)
20
6121h: Safety inverted
position value
Safety inverted position value (offset with
calibration and offset values)
21
6124h: Safety speed value
Safety speed value
22
6125h: Safety inverted speed
value
Safety inverted speed value
23
61FEh: Safety application
configuration
Activate the safety configuration for SRDO1 and
SRDO2
24
61FFh: Safety configuration
signature (checksum)
Signatures (checksums) for safety configuration of
position and speed
24
Table 3: Overview of objects
3.2.2 Object description
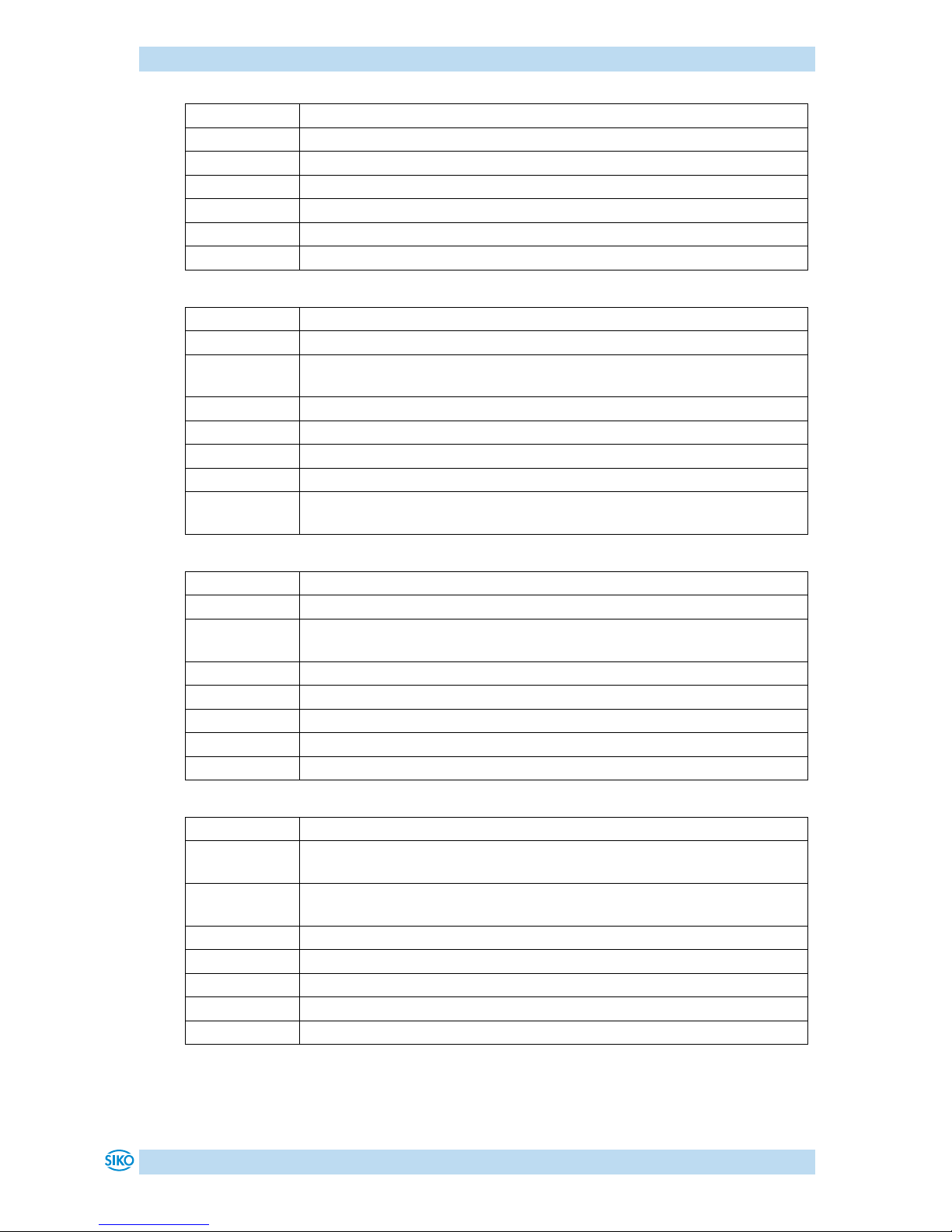
3.2.2.1 1301h: SRDO1 communication parameters
The communication behavior of SRDO1 can be determined via object 1301h.
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 9 von 25
Sub-index
00h
Description
indicates the largest supported sub-index
Access
ro
PDO mapping
no
Data type
UNSIGNED 8
Default
6h
EEPROM
no
Sub-index
01h
Description
Direction of information
Access
ro, if NMT state is operational
rw, if NMT state is pre-operational
PDO mapping
no
Data type
UNSIGNED 8
Default
1
EEPROM
yes
Data content
0: SRDO1 is not valid
1: SRDO1 is TX and valid
Sub-index
02h
Description
refresh time
Access
ro, if NMT state is operational
rw, if NMT state is pre-operational
PDO mapping
no
Data type
UNSIGNED 16
Default
25
EEPROM
yes
Data content
10…65535
Sub-index
03h
Description
tx: reserved
rx: SRVT
Access
ro, if NMT state is operational
rw, if NMT state is pre-operational
PDO mapping
no
Data typ
UNSIGNED 8
Default
20
EEPROM
no
Data content
20
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 10 von 25
Sub-index
04h
Description
transmission type
Access
ro
PDO mapping
no
Data type
UNSIGNED 8
Default
254
EEPROM
no
Sub-index
05h
Description
COB-ID1
Access
ro, if NMT state is operational
rw, if NMT state is pre-operational
PDO mapping
no
Data type
UNSIGNED 32
Default
000000FFh + 2*Node ID
EEPROM
yes
Data content
257…383. Only odd numbers are allowed.
Sub-index
06h
Description
COB-ID2
Access
ro, if NMT state is operational
rw, if NMT state is pre-operational
PDO mapping
no
Data type
UNSIGNED 32
Default
00000100h + 2*Node ID
EEPROM
yes
Data content
258…384. Only even numbers are allowed.
3.2.2.2 1302h: SRDO2 communication parameters
The communication behavior of SRDO2 can be determined via 1302h.
Sub-index
00h
Description
indicates the largest supported sub-index
Access
ro
PDO mapping
no
Data type
UNSIGNED 8
Default
6h
EEPROM
no
Sub-index
01h
Description
Direction of information
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 11 von 25
Access
ro, if NMT state is operational
rw, if NMT state is pre-operational
PDO mapping
no
Data type
UNSIGNED 8
Default
1
EEPROM
yes
Data content
0: SRDO2 is not valid
1: SRDO2 is TX and valid
Sub-index
02h
Description
refresh time
Access
ro, if NMT state is operational
rw, if NMT state is pre-operational
PDO mapping
no
Data type
UNSIGNED 16
Default
25
EEPROM
yes
Data content
10…65535
Sub-index
03h
Description
tx: reserved
rx: SRVT
Access
ro, if NMT state is operational
rw, if NMT state is pre-operational
PDO mapping
no
Data type
UNSIGNED 8
Default
20
EEPROM
nein
Dateninhalt
20
Sub-index
04h
Description
transmission type
Access
ro
PDO mapping
no
Data type
UNSIGNED 8
Default
254
EEPROM
no
Sub-index
05h
Description
COB-ID1
Access
ro, if NMT state is operational
rw, if NMT state is pre-operational
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 12 von 25
PDO mapping
no
Data type
UNSIGNED 32
Default
0000010Fh + 2*Node ID
EEPROM
yes
Data content
257…383. Only odd numbers are allowed.
Sub-index
06h
Description
COB-ID2
Access
ro, if NMT state is operational
rw, if NMT state is pre-operational
PDO mapping
no
Data type
UNSIGNED 32
Default
00000110h + 2*Node ID
EEPROM
yes
Data content
258…384. Only even numbers are allowed.
3.2.2.3 1381h: SRDO1 mapping parameters
Object 1381h determines the objects that are mapped in the first Transmit SRDO (SRDO1).
Sub-index
00h
Description
indicates the largest supported sub-index
Access
ro
PDO mapping
no
Data type
UNSIGNED 8
Default
8h
EEPROM
no
Sub-index
01h
Description
1st object of the SRDO1 message with the COB ID1 (data byte 0)
Access
ro
PDO mapping
no
Data type
UNSIGNED 32
Default
61200108h (position value object 6120h, sub-index 01h, 8bit)
EEPROM
no
Sub-index
02h
Description
1st object of the SRDO1 message with the COB ID2 (data byte 0)
Access
ro
PDO mapping
no
Data type
UNSIGNED 32
Default
61210108h (inverted position value object 6121h, sub-index 01h, 8bit)
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 13 von 25
EEPROM
no
Sub-index
03h
Description
2nd object of the SRDO1 message with the COB ID1 (data byte 1)
Access
ro
PDO mapping
no
Data type
UNSIGNED 32
Default
61200208h (position value object 6120h, sub-index 02h, 8bit)
EEPROM
no
Sub-index
04h
Description
2nd object of the SRDO1 message with the COB ID2 (data byte 1)
Access
ro
PDO mapping
no
Data type
UNSIGNED 32
Default
61210208h (inverted position value object 6121h, sub-index 02h, 8bit)
EEPROM
no
Sub-index
05h
Description
3rd object of the SRDO1 message with the COB ID1 (data byte 2)
Access
ro
PDO mapping
no
Data type
UNSIGNED 32
Default
61200308h (position value object 6120h, sub-index 03h, 8bit)
EEPROM
no
Sub-index
06h
Description
3rd object of the SRDO1 message with the COB-ID2 (data byte 2)
Access
ro
PDO mapping
no
Data type
UNSIGNED 32
Default
61200308h (inverted position value object 6121h, sub-index 03h, 8bit)
EEPROM
no
Sub-index
07h
Description
4th object of the SRDO1 message with the COB ID1 (data byte 3)
Access
ro
PDO mapping
no
Data type
UNSIGNED 32
Default
61200408h (position value object 6120h, sub-index 04h, 8bit)
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 14 von 25
EEPROM
no
Sub-index
08h
Description
4th object of the SRDO1 message with the COB ID2 (data byte 3)
Access
ro
PDO mapping
no
Data type
UNSIGNED 32
Default
61210408h (inverted position value object 6121h, sub-index 04h, 8bit)
EEPROM
no
3.2.2.4 1382h: SRDO2 mapping parameters
Object 1382h determines the objects that are mapped in the second Safety Transmit SRDO
(SRDO2).
Sub-index
00h
Description
indicates the largest supported sub-index
Access
ro
PDO mapping
no
Data type
UNSIGNED 8
Default
4h
EEPROM
no
Sub-index
01h
Description
1st object of the SRDO2 message with the COB ID1 (data byte 0)
Access
ro
PDO mapping
no
Data type
UNSIGNED 32
Default
61240108h (speed value object 6124h, sub-index 01h, 8bit)
EEPROM
no
Sub-index
02h
Description
1st object of the SRDO2 message with the COB ID2 (data byte 0)
Access
ro
PDO mapping
no
Data type
UNSIGNED 32
Default
61250108h (inv. speed value object 6125h, sub-index 01h, 8bit)
EEPROM
no
Sub-index
03h
Description
2nd object of the SRDO2 message with the COB ID1 (data byte 1)
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 15 von 25
Access
ro
PDO mapping
no
Data type
UNSIGNED 32
Default
61240208h (speed value object 6124h, sub-index 02h, 8bit)
EEPROM
no
Sub-index
04h
Description
2nd object of the SRDO2 message with the COB ID2 (data byte 1)
Access
ro
PDO mapping
no
Data type
UNSIGNED 32
Default
61250208h (inv. speed value object 6125h, sub-index 02h, 8bit)
EEPROM
no
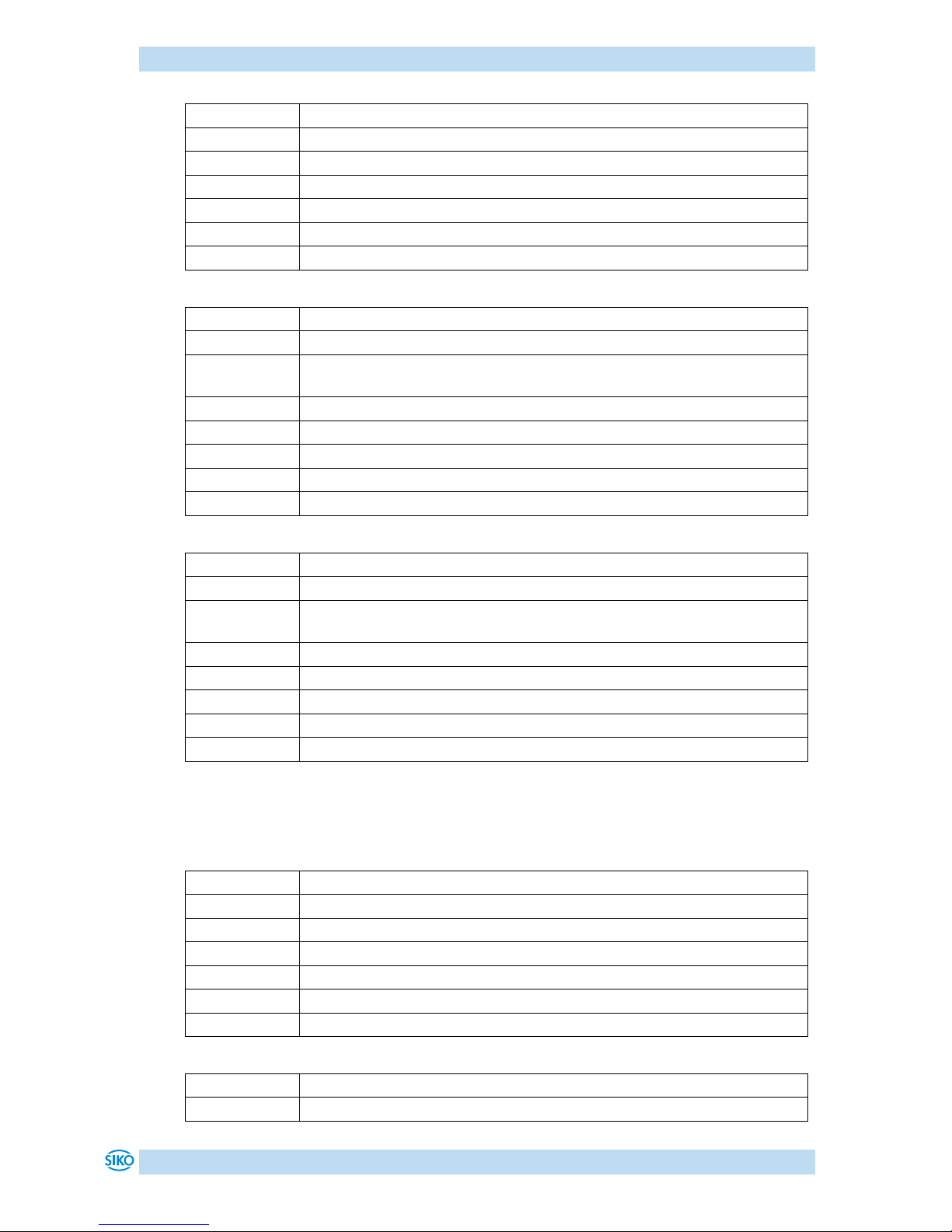
3.2.2.5 13FEh: Safety configuration
The SRDO configuration can be switched to valid by means of object 13FEh.
Sub-index
00h
Description
This parameter will be switched to invalid automatically after changing a
parameter in object 1301h or 1302h and must be switched valid again via
this object. Switching to valid is only enabled if the correct signatures are
entered in object 13FFh.
Access
rw
PDO mapping
no
Data type
UNSIGNED 8
Default
0h
EEPROM
yes
Data content
A5h: SRDO1 and SRDO2 configuration valid
00h…A4h and A6h…FFh: SRDO1 and SRDO2 configuration invalid
3.2.2.6 13FFh: Safety configuration signature (checksum)
This object 13FFh receives the signatures (checksums) via the CANopen Safety parameters of
SRDO1 and SRDO2. Only a checksum which is valid at that time can be transmitted. The
checksum is checked anew before switching the configuration to valid. Any change to the
configuration will be valid only after passing.
Sub-index
00h
Description
indicates the largest supported sub-index
Access
ro
PDO mapping
no
Data type
UNSIGNED 8
Default
2h
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 16 von 25
EEPROM
no
Sub-index
01h
Description
SRDO1 signature (checksum)
Access
rw
PDO mapping
no
Data type
UNSIGNED 16
Default
0000h
EEPROM
yes
Data content
The checksum CRC-16-CCITT is calculated via the content of the two
objects 1301h and 1381h.
Object
Sub-
index
Name
Extent
Value
1301h
SRDO1 communication parameter
01h
Direction of information
1 byte
Object 1301h
sub-index 01h
02h
Refresh time
2 bytes
Object 1301h
sub-index 02h
03h
tx: reserved
rx: SRVT
1 Byte
Object 1301h
sub-index 03h
05h
COB ID 1
4 bytes
Object 1301h
sub-index 05h
06h
COB ID 2
4 bytes
Object 1301h
sub-index 06h
1381h
SRDO1 mapping parameters
00h
Highest sub-index
1 byte
08h
01h
Sub-index
1 byte
01h
01h
Position value 1st byte
4 bytes
61200108h
02h
Sub-index
1 byte
02h
02h
Inverted position value
1st byte
4 bytes
61210108h
03h
Sub-index
1 byte
03h
03h
Position value 2nd byte
4 bytes
61200208h
04h
Sub-index
1 byte
04h
04h
Inverted position value
2nd byte
4 bytes
61210208h
05h
Sub-index
1 byte
05h
05h
Position value 3rd byte
4 bytes
61200308h
06h
Sub-index
1 byte
06h
06h
Inverted position value
3rd byte
4 bytes
61210308h
07h
Sub-index
1 byte
07h
07h
Position value 4th byte
4 bytes
61200408h
08h
Sub-index
1 byte
08h
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 17 von 25
08h
Inverted position value
4th byte
4 bytes
61210408h
Sub-index
02h
Description
SRDO2 signature (checksum)
Access
rw
PDO mapping
no
Data type
UNSIGNED 16
Default
0000h
EEPROM
yes
Data content
The checksum CRC-16-CCITT is calculated via the content of the two
objects 1302h and 1382h.
Object
Sub-
index
Name
Extent
Value
1302h
SRDO2 communication parameter
01h
Direction of information
1 byte
Object 1302h
sub-index 01h
02h
Refresh time
2 bytes
Object 1302h
sub-index 02h
03h
tx: reserved
rx: SRVT
1 Byte
Object 1302h
sub-index 03h
05h
COB ID 1
4 bytes
Object 1302h
sub-index 05h
06h
COB ID 2
4 bytes
Object 1302h
sub-index 06h
1382h
SRDO2 mapping parameters
00h
Highest sub-index
1 byte
04h
01h
Sub-index
1 byte
01h
01h
speed value 1st byte
4 bytes
61240108h
02h
Sub-index
1 byte
02h
02h
Inverted speed value 1st
byte
4 bytes
61250108h
03h
Sub-index
1 byte
03h
03h
speed value 2nd byte
4 bytes
61240208h
04h
Sub-index
1 byte
04h
04h
Inverted speed value 2nd
byte
4 bytes
61250208h
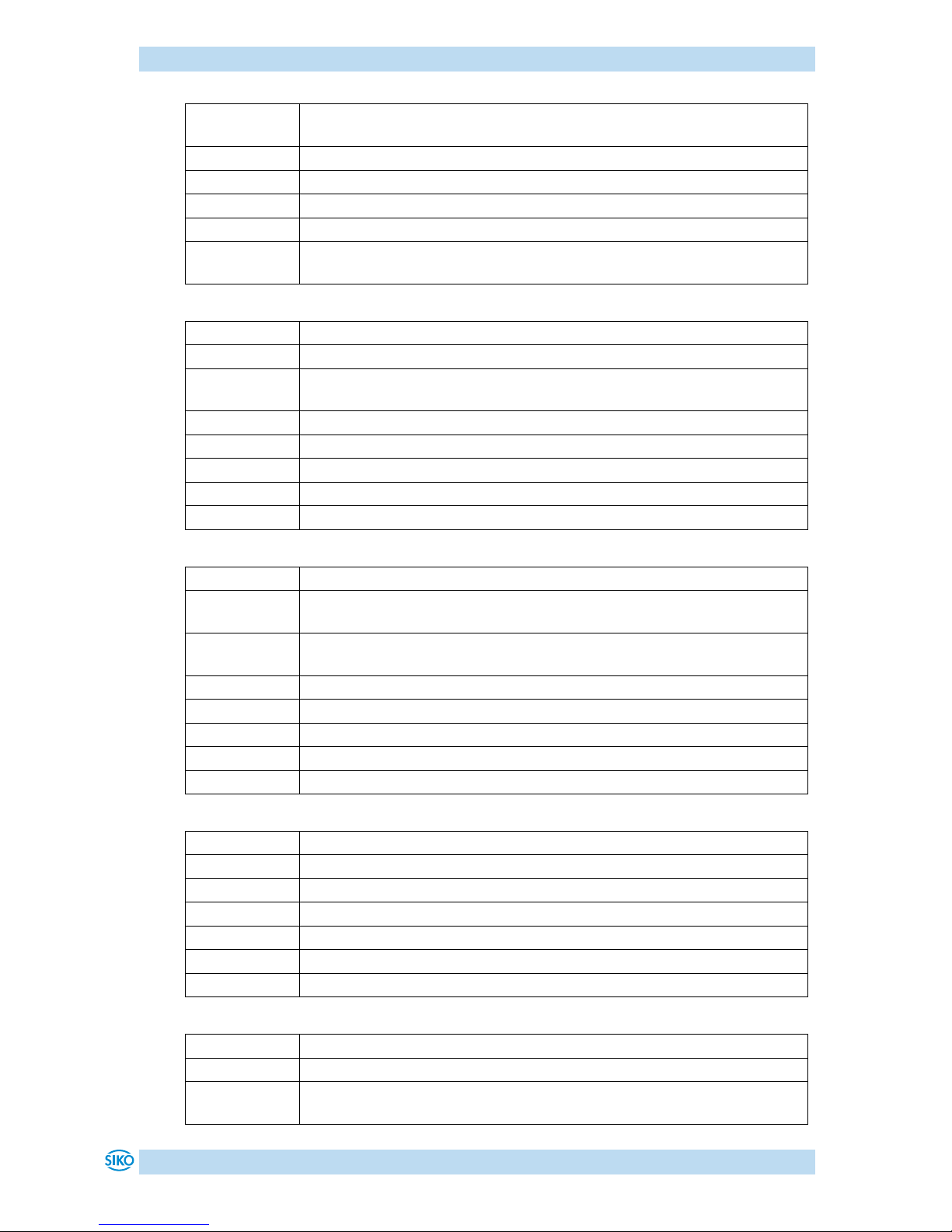
3.2.2.7 6100h: Safety configuration parameters of position
Via object 6100h, settings for the position and its transmission can be made.
Sub-index
00h
Description
indicates the largest supported sub-index
Access
ro
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 18 von 25
PDO mapping
no
Data type
UNSIGNED 8
Default
2h
EEPROM
no
Sub-index
01h
Description
Safety sense of direction
Access
rw (write in the Pre-operational NMT state only)
PDO mapping
no
Data type
UNSIGNED 16
Default
0000h
EEPROM
yes
Data content
0: CW
1: CCW
Sub-index
02h
Description
Safety preset value (calibration value)
Access
rw (write in the Pre-operational NMT state only)
PDO mapping
no
Data type
SIGNED 32
Default
0h
EEPROM
yes
Data content
Encoder type
Default
With changed APU (object 6001h)
Single-turn
0…16383
0…((APU*1)-1)
4 bit multi-turn
0…262143
0…((APU*16)-1)
8 bit Multi-turn
0…4194303
0…((APU*256)-1)
12 bit multi-
turn
0…67108863
0…((APU*4096)-1)
3.2.2.8 6101h: Safety configuration parameters of speed
Via object 6101h, settings for speed and its transmission can be made.
Sub-index
00h
Description
indicates the largest supported sub-index
Access
ro
PDO mapping
no
Data type
UNSIGNED 8
Default
7h
EEPROM
no
Sub-index
01h
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 19 von 25
Description
Safety sense of direction
Access
rw (write in the Pre-operational NMT state only)
PDO mapping
no
Data type
UNSIGNED 16
Default
0000h
EEPROM
yes
Data content
0: CW
1: CCW
Sub-index
02h
Description
Safety preset value (calibration value)
Access
rw (write in the Pre-operational NMT state only)
PDO mapping
no
Data type
SIGNED 32
Default
0h
EEPROM
yes
Data content
Encoder type
Default
With changed APU (Object 6001h)
Single-turn
0…16383
0…((APU*1)-1)
4 bit multi-turn
0…262143
0…((APU*16)-1)
8 bit multi-turn
0…4194303
0…((APU*256)-1)
12 bit multi-
turn
0…67108863
0…((APU*4096)-1)
Sub-index
04h
Description
Safety speed source selector
Access
rw (write in the Pre-operational NMT state only)
PDO mapping
no
Data type
UNSIGNED 8
Default
02h
EEPROM
yes
Data content
02h: Object 600C raw value of position is used
Sub-index
05h
Description
Safety integration time of speed
Access
rw (write in the Pre-operational NMT state only)
PDO mapping
no
Data type
UNSIGNED 16
Default
64h
EEPROM
yes
Data content
64h: 100 ms
C8h: 200 ms
Communication via CAN-Bus (CANopen and CANopen Safety)
WV58MR Datum: 16.11.2018 Art. Nr. 89117 Änd. Stand 373/1 Seite 20 von 25
Sub-index
06h
Description
Safety multiplier
Access
rw (write in the Pre-operational NMT state only)
PDO mapping
no
Data type
UNSIGNED 16
Default
01h
EEPROM
yes
Data content
01h
Sub-index
07h
Description
Safety divisor
Access
rw (write in the Pre-operational NMT state only)
PDO mapping
no
Data type
UNSIGNED 16
Default
01h
EEPROM
yes
Data content
01h
Speed value [Inc/ms] = (new raw position value object 600Ch - old raw position value object
600Ch) / (integration time [ms] object 6101h sub-index 05h * 10-3) * multiplier object
6101h sub-index 06h / divisor object 6101h sub-index 07h
3.2.2.9 6120h: Safety position value
Via object 6120h, the position value can be read byte by byte.
Sub-index
00h
Description
indicates the largest supported sub-index
Access
ro
PDO mapping
no
Data type
UNSIGNED 8
Default
4h
EEPROM
no
Sub-index
01h
Description
Safety position byte 1
Access
ro
PDO mapping
no
Data type
UNSIGNED 8
Default
0h
EEPROM
no
Other manuals for WV58MR
4
Table of contents
Other Siko Media Converter manuals

Siko
Siko SGL Series Operation manual

Siko
Siko ProTool SGH10 User manual

Siko
Siko SGI Operation manual

Siko
Siko SG62 User manual

Siko
Siko SG30 Operation manual

Siko
Siko WV36M/SSI User manual

Siko
Siko WV36M/SSI Operation manual

Siko
Siko WV58MR User manual

Siko
Siko WH3650M User manual

Siko
Siko WV5800M User manual































