8
GF U3000 V2 Ultrasonic FlowmeterModbus Supplement to the operating instructions
8 7
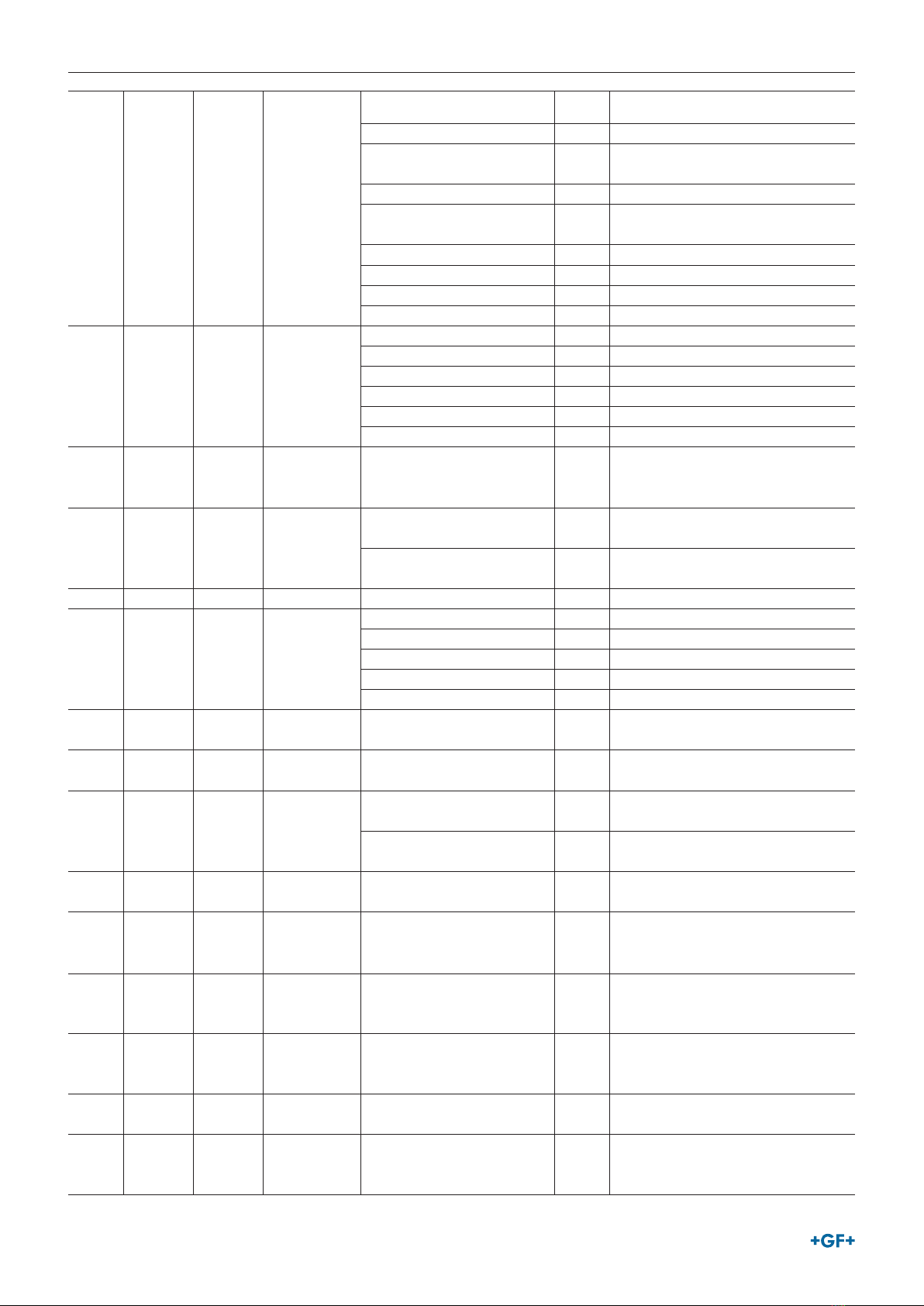
Instru-
ment
Status
Flags
uint16
Online:1 R Device is reading flow
Urgent Error:1 An urgent error has been reported
Remote Total Changes
Disabled:1
Instrument has barred updates of all
totals. 1=MBM changes disabled
Current Loop Alarm:1 1=active (current loop alarm active)
Digital Device 0 Alarm:1 1=active (Digital device 0 is currently
unimplemented, so always 0)
Digital Device 1 Alarm:1 1=active (Digital Output 1)
Digital Device 2 Alarm:1 1=active (Digital Output 2)
Digital Device 3 Alarm:1 1=active (Digital Output 3)
Reserved:8
9,10 8,9 Date /
Time
uint32
Sec:6 R 0 to 59
Min:6 0 to 59
Hour:5 0 to 23
Day:5 1 to 31; 1st = 1
Month:4 1 to 12; Jan = 1
Year:6 (base 2000) Add 2000 for full year.
11 10 Reserved uint16
Reserved: 1
Outputs Available:3
Reserved:12
R
Not available at the time of writing, but
may be used to allow Management
system to control digital output(s)
12 11 Reserved uint16
Reserved:1 W Not available at the time of writing but
may be used to allow the
Output Values:3
Reserved:12
MBM to control digital output(s) on a
unit
12-100 Reserved uint16 Sec:6 RZ 0 to 59
101,
102 100-101
Date /
Time uint32
Min:6 R 0 to 59
Hour:5 0 to 23
Day:5 1 to 31; 1st = 1
Month:4 1 to 12; Jan = 1
Year:6 (base 2000) Add 2000 for full year.
103,
104
102-103 Reserved uint16× 2 RZ Reads Zero. Not used. Future Expansion
105,
106
104,105 Measured
Velocity
IEEE 754 SP m/s, ft/s, ft/s, m/s R Metric1, Imperial, US Imperial, Metric2
Reads zero when not measuring flow.
107,
108
106,107 Measured
Flow
IEEE 754 SP
l/s, Imp gallon/s, US gallon/s,
m3/hr
R Metric1, Imperial, US
s, US gallon/s, m3/hr Imperial, Metric2
Reads zero when not measuring flow.
109,
110
108,109 Forward
Total
IEEE 754 SP litres, Imp gallons, US
gallons,m3
RW Metric1, Imperial, US Imperial, Metric2
111,
112 110,111
Reverse
Total IEEE 754 SP
litres, Imp gallons, US
gallons,m3 RW Metric1, Imperial, US Imperial, Metric 2
113,
114 112,113
Fwd
Energy
Total
IEEE 754 SP kWH, BTU, BTU, kWH RW Metric1, Imperial, US Imperial, Metric2
115,
116 114,115
Rev
Energy
Total
IEEE 754 SP kWH, BTU, BTU, kWH RW Metric1, Imperial, US Imperial, Metric2
117-132 116-131 Reserved uint16× 16 RZ Reads Zero. Not used. Future Expansi-
on.
133,
134 132, 133
Instanta-
neous
Power
IEEE 754 SP kW, BTU/s, BTU/s, kW R
Metric1, Imperial, US Imperial, Metric2
Reads zero when not measuring flow.