8
Status data
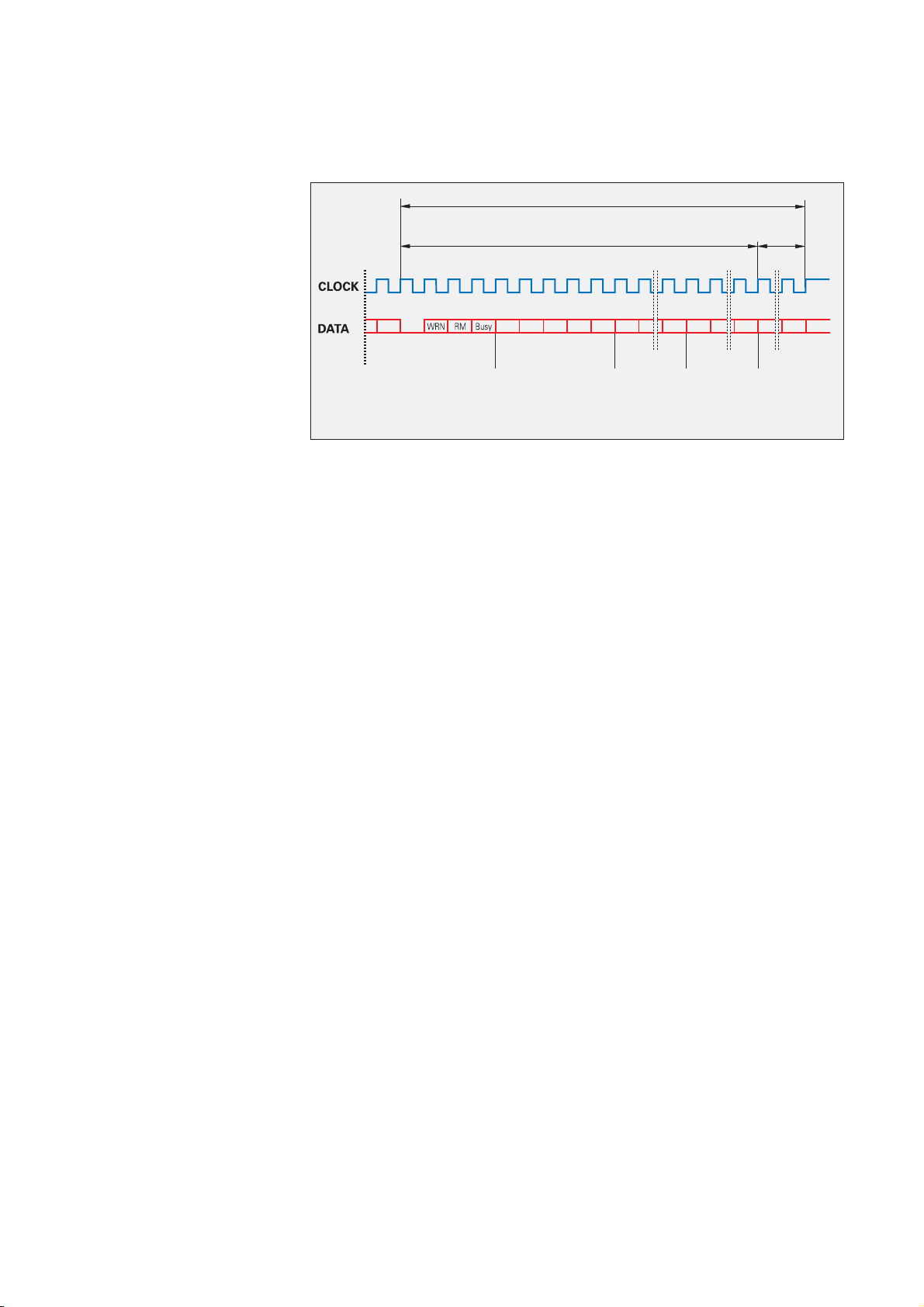
WRN—warnings
This collective bit indicates whether certain
tolerance limits of the encoder have been
reached or exceeded, for example rotational
speed or light source control reserve,
without necessarily indicating an incorrect
position value.This function makes it
possible to issue preventive warnings in
order to minimize idle time.The cause of
the warning is stored in the encoder
memory. The alarms and warnings
supported by the respective encoder are
saved in the "parameters of the encoder
manufacturer" memory area.
RM—reference marks
The RM bit indicates whether the reference
run has been completed. In incremental
systems, this is required in order to
establish the absolute reference to the
machine reference system.The absolute
position value can then be read from the
additional data 1. On absolute encoders,
the RM bit is always on HIGH.
Busy—parameter request
When LOW, the busy bit indicates that a
parameter request (read/write) is possible.
If a request is being processed (HIGH), the
encoder memory must not be accessed.
Content of the additional data
The content of the additional data is defined
by the mode command for selection of a
memory area.This content, updated with
each clock pulse, is transmitted until there
is a new request. A unique number is
assigned to each additional datum. It is
5 bits in length and is transmitted for
inspection purposes.The following
contents are possible:
Additional datum 1
Diagnostics•
Cyclic information on encoder function
and additional diagnostic values.
Position value 2•
For incremental encoders: Relative
position information (counter starts
from zero at switch-on). The absolute
position value is only available after the
reference marks have been traversed
(RM bit HIGH).
For absolute encoders: Second absolute
position value for safety-related
applications.
Memory parameters•
Parameters saved in the encoder can
also be transmitted along with the
position values.The request is defined
via memory range selection, followed
by output of the parameters with the
associated address.
MRS code—acknowledgment•
Acknowledgment of the requested
memory area selection
Test values•
Test values serve for inspection
purposes, in service diagnostics, for
example.
Temperature•
Transmission of temperature in encoders
with integrated evaluation of
temperature sensors.
Additional sensors•
The EnDat 2.2 protocol enables the
connection of 16 additional sensors (4-bit
address).The sensor values are output in
a rolling request process (x+1); the
assigned sensor can be identified based
on the supplied address.
Additional datum 2
Commutation•
Some incremental encoders provide
“rough” position information for
commutation in electric motors.
Acceleration•
If the encoder has additional sensor
systems for acceleration measurement,
it can transmit the results.
Limit position signals•
Limit position signals and homing
information.
Asynchronous position value•
Position formed by oversampling
between two "regular" requests.
Operating status error sources•
Detailed information about the cause of
the present error message.
Timestamp•
Reserved for touch probes
30 bits
Additional data 5 bits
CIRCLE
Acknowledgment of
additional data 8 bits
address or
data
8 bits data
Additional data
One or two additional data can be appended
to the position value, depending on the
type of transmission (selection via MRS
code).The additional data are each 30 bits
in length, with a LOW level as first bit. Each
additional datum is concluded with a CRC
that is formed from the respective additional
data without the first bit or the CRC.
The additional data supported by the
respective encoder is saved in the encoder
parameters.
The additional data includes status
information, addresses, and data: